V
主页
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
发布人
为解决通过3DGS合成新型视图结果出现的伪影现象,该论文提出了Mip-Splatting,一种改进的三维高斯抛雪球技术,通过引入三维平滑过滤器和二维Mip过滤器,实现了任意比例下的无锯齿渲染。。。。。。 标题:Mip-Splatting Alias-free 3D Gaussian Splatting 链接:https://niujinshuchong.github.io/mip-splatting/
打开封面
下载高清视频
观看高清视频
视频下载器
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
NeurlPS'24开源 | 无与伦比的重建质量!3DGS-Enhancer:利用扩散先验增强无界3D GS!
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
3D Gaussian Splatting再进化,即使是模糊的图像也可以渲染出高保真的3D场景了。
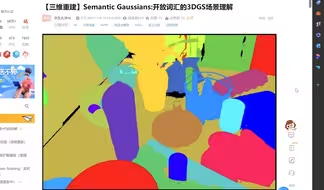
【三维重建】Semantic Gaussians:开放词汇的3DGS场景理解
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
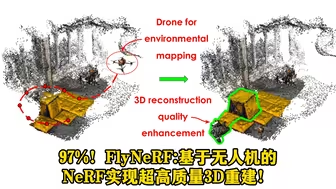
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
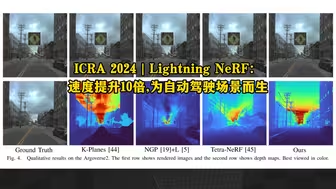
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
小波变换+注意力机制新突破! 再登Nature!附15种创新思路
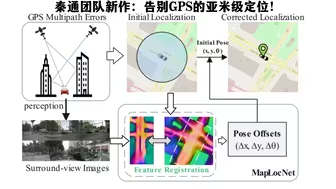
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
(CVPR 2024)即插即用多尺度注意力机制MAB模块,即用即涨点起飞
强到离谱!一年轻松发6篇综述SCI!B站最全SCI论文写作指导教程,研究生SCI论文从写作到发表全过程精讲,太适合小白了!人工智能|SCI|论文写作
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
MicroDreamer :20s零样本 生成3D mesh,显著降低3D物体 生成的神经网络迭代次数
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
3DGS技术在水下:实现散射介质中的高质量场景快速重建!
自从学会抄,一年轻松发6篇SCI!B站公认最好的【SCI论文写作教程】基本套路+实操演示,包含所有干货内容!-论文/SCI论文/毕业论文
GaussianRPG:首个开源的基于3DGS的自动驾驶闭环仿真器(上篇)
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
RSS'24满分论文 | ATM框架 无需大量标注,让机器人 从视频学习变得简单高效
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
如何快速完成顶会论文,计算机专业论文全面讲解,让你在最短的时间能完成自己的论文!零基础小白也能一气呵成的发表论文!-人工智能、计算机、SCI论文、CVPR论文
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
来自中科院关于3DGS进展的最新综述,该团队的本次调查旨在帮助初学者快速进入该领域,并为经验丰富的研究人员提供全面的概述
强推! 导师散养不管不问,中山大学最新最全的【SCI论文写作】从研究性以及综述论文角度出发全套流程-SCI论文_SCI论文写作
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
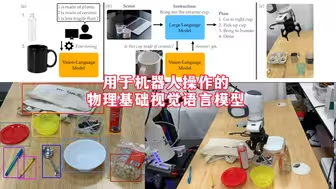
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界