V
主页
京东 11.11 红包
「稿件展示」“泡”
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
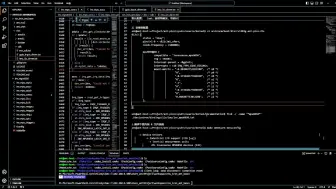
从零开始ROS小车之pwm控制轮子代码编写及讲解
从零开始ROS小车之按键控制小车消息发布&小车订阅消息并解析
从零开始ROS小车之IMU-MPU6050驱动讲解(1)
从零开始ROS小车之Linux主机环境构建
从零开始ROS小车之docker环境搭建(1)
从零开始ROS小车之docker环境搭建(2)
从零开始ROS小车之差速双轮控制bugfix
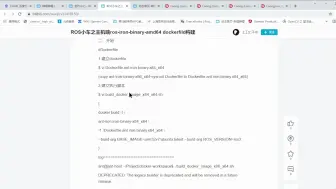
从零开始ROS小车之主机端ros-iron-binary-amd64 dockerfile构建(opration)
从零开始ROS小车之amd64 micro-ros host-agent 编译(三)
从零开始ROS小车之micro-ros-armhf host 编译环境建立(operation二)翻车现场
从零开始ROS小车之micro-ros-armhf host 编译环境建立(operation一)
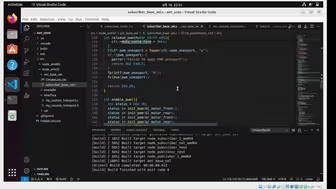
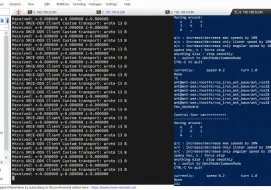
从零开始ROS小车之vscode+cmake 编译micro-ros的publisher&subscriber发布消息并订阅完整演示版
从零开始ROS小车之docker 容器网络链接 amd64 to arm32v7
从零开始ROS小车之小车动起来key_board 发布节点建立
从零开始ROS小车之差速双轮控制subscriber进程退出机制
从零开始ROS小车之11行代码控制差分双轮运动算法演示及讲解
从零开始ROS小车之arm32v7 iron micro-ros host 编译环境建立(summary)
从零开始ROS小车之主机端ros-iron-binary-amd64构建
ROS控制 | 第一轮控制功能包讲解
从零开始ROS小车arm32v7 iron micro-ros library(三)编译
LINUX-AV-2.RV1103-固件下载至板卡
【开源教程】ROS+PX4开源机械臂控制(上)
ROS小车之iron-src-armhf编译 (2)
从零开始ROS小车之主机端ros-iron-binary-amd64 dockerfile构建(summry)
从零开始ROS小车之amd64 micro-ros host-agent 编译(二)
从零开始ROS小车之docker-arm32v7-iron编译环境
从零开始ROS小车arm32v7 iron micro-ros library(二)编译规则
LINUX-AV-4.RV1103-mt7601u模块方式加载驱动
从零开始ROS小车arm32v7 iron micro-ros library(一)构建
【开源无人船】ArduPilot飞控连接MAVROS
LINUX-AV-1.RV1103-SDK下载编译
示波器的使用(原理不想讲,会用就行)
LINUX-AV-3.RV1103-配置USB_host模式及挂载U盘
ROS控制 | 第一轮导航代码讲解
从零开始ROS小车之vscode+cmake 编译第一个node 源码编辑
从零开始ROS小车arm32v7 iron micro-ros host 编译完成
第26讲:无人机检测与追踪行人(YOLO)仿真
从零开始ROS小车之Linux下mpu6050驱动加载及中断测试数据
9分钟让你彻底搞懂编码电机的原理和玩法
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)