V
主页
京东 11.11 红包
华南理工大学《JACS》:基于凝聚层的磁控液体机器人穿过迷宫
发布人
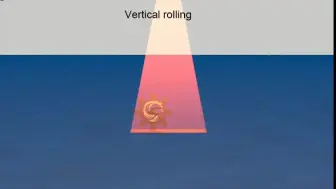
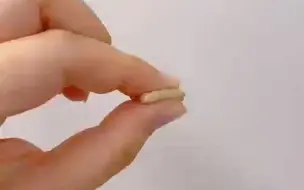
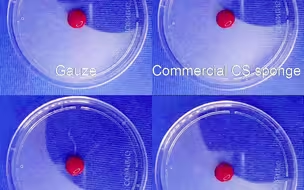
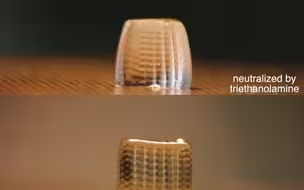
https://doi.org/10.1021/jacs.2c13287 磁控微型超软机器人能够在外部磁场的引导下无创地进入人体内一些深层受限部位。然而,现有基于弹性体和水凝胶的大多数软体机器人,变形能力有限,难以穿过比机器人尺寸小得多的狭窄缝隙。为了解决上述问题,一些具有卓越变形能力的磁控液滴近期被报道用于体外货物运输,如铁磁流体和液态金属。但是这些油基或金属基液滴操作条件的限制以及相对较差的生物相容性,阻碍了它们在体内的生物医学应用。因此开发弹性体和水凝胶以外的新型高分子材料,以赋予磁控机器人卓越的变形能力和对空间的快速适应能力,在生物医学领域具有潜在的重要应用价值。 凝聚层是一类与水不混溶的高浓度高分子水溶液,由分散在水中的高分子在超分子相互作用的驱动下通过液?液相分离形成的液体凝聚相,在生物界面粘附、大分子药物载体以及原始细胞模拟等生物医学领域逐渐引起了研究者的关注。华南理工大学生物医学科学与工程学院边黎明教授团队开发了一种纳米颗粒自组装凝聚层作为磁控液体机器人。该高生物相容性的毫米级凝聚层液体机器人可以通过超细针头注射,在变化的pH和盐浓度下保持稳定,根据需要释放装载的“货物”,快速通过人工毛细血管网络,并在体内实现由外部磁场引导的血管内靶向。因此,“基于凝聚层的液体机器人”在生物医学领域可以执行超出传统弹性体或水凝胶软体机器人能力以外的苛刻任务,代表了一种高性能超软体机器人的独特设计策略。 该工作以“Water-Immiscible Coacervate as a Liquid Magnetic Robot for Intravascular Navigation”为题发表在《Journal of the American Chemical Society》上(J. Am. Chem. Soc., 2023, 145, 6, 3312)。
打开封面
下载高清视频
观看高清视频
视频下载器
用于软机器人多功能控制的磁性液态金属
北海道大学《JACS》:水凝胶机械损伤实现实时可视化!
《AM》:柔性自粘电极的水凝胶
石墨烯液体电池中纳米晶体反应动力学和异质性的4D-STEM
各种液体在光滑表面上的电滑行
香港大学《AM》:“个性化定制”的载药控释可注射纤维水凝胶
为3D打印注入“生命力”:菌丝体水凝胶3D打印成活性复合材料
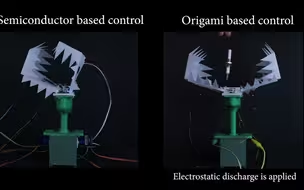
基于折纸的机器人集成,能够感知、决定和响应
Science:用光3D打印纳米晶体
导电甘油凝胶
麻省理工学院:有牢固界面和功能微结构的水凝胶-人造橡胶杂化材料
【Nature正刊】原位TEM观察CH4在Ni纳米晶上催化分解形成管状碳纳米纤维
用于构建人工脊柱组织的可重构磁性液体构建块
JACS:用于组织工程的刺激响应性五肽纳米纤维水凝胶
不对称机械响应水凝胶,登上Sciecne,可诱发各种物体的定向运动
肠道“微针”机器人
华南理工大学:原位TEM记录热解过程
Nature:高强度、高拉伸性、抗疲劳且高含水量的水凝胶
凝聚悬浮液的振荡转变
【Nature子刊】香港中文大学科研成果:基于双光子聚合的超快多焦点三维纳米制造-多焦点制造工艺和结果演示
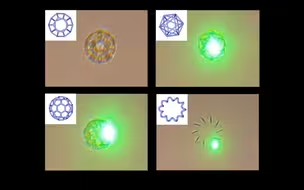
利用光电镊中可编程光图案实现纳米剪纸微型转子自由操控
皮肤粘附弹性水凝胶贴片
原位拉伸:扭曲铁磁纳米复合材料的形状记忆效应
具有可编程形状和功能的用于腔内手术的磁性连续转向机器人
一种在弱磁场干预下,通过超顺磁性纳米粒子掺杂辅助纤维素纳米晶定向组装具有近乎完美取向的光学结构
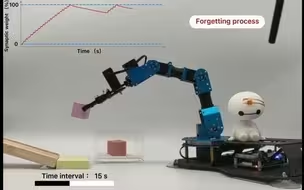
模拟突触的水凝胶:在施加一个强刺激作为学习过程后,由滑动目标物体触发的每个弱刺激可以控制机器人手成功地抓住并移动它到一个盒子
最新Nature:水凝胶!实现体内软骨再生
Nature Nanotechnology:光催化水凝胶,实现大规模太阳能制氢!
用于增强心肌梗死修复的具有α-生育酚包封的可注射和导电纳米胶束水凝胶
《Nat. Commun.》:性能优异的超疏水涂层(1)
通过平衡化学交联和物理缠结设计超高水含量、坚韧和抗裂水凝胶
《AFM》:用于不可压缩出血控制的快速膨胀壳聚糖纤维冷冻凝胶
微型磁控机器人高效消除因中风引起的脑出血
东华大学朱美芳院士团队《AM》:仿贝壳纳米复合气凝胶——面向极端环境使役的热防护材料(3)
中国农大/中科院理化所《Nature》子刊:相变材料“碰磁”研究进行时
用于根除生物膜的具有药物释放功能的磁性水凝胶
应用“激光切水”加工的微流控芯片和液滴进行液体泵送、阀、液体混合、液体梯度稀释和分段溶液构建等液体操控
通过控制预印水凝胶支架的干燥,填充其他成分,在宏观层面上创建3D微结构
稳定的超长室温磷光共聚物
Science:亚纳米线锁住多种挥发性有机液体,形成自支撑的弹性有机凝胶