V
主页
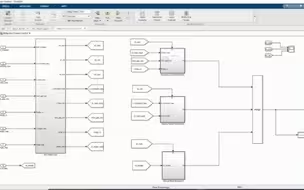
Carsim simulink的mpc轨迹跟踪
发布人
网络 Carsim simulink的mpc轨迹跟踪
打开封面
下载高清视频
观看高清视频
视频下载器
四轮转向汽车Carsim- simulink联合仿真MPC路径跟踪模型
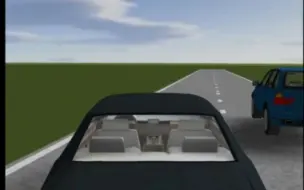
CarSim与Simulink联合仿真,实时检测,动态规划路径,实现超车换道,基于mpc,模型预测控制实现
MPC,ADRC和PID轨迹跟踪控制器Simulink模型
MPC跟踪轨迹圆形(以后轴为基准)
基于simulink和carsim联合仿真
carsim+simulink联合仿真实现变道
自动驾驶控制-基于车辆运动学模型MPC跟踪圆形轨迹仿真
无人驾驶纵向控制-mpc实现纵向位置跟踪
carsim-simulink四轮转向汽车联合仿真
无人驾驶车辆模型预测控制(MPC) 跟踪一个恒定的参考轨迹
自动驾驶控制-二自由度动力学MPC任意路径跟踪
无人驾驶基于自适应mpc的轨迹跟踪控制仿真跟踪轨迹
人工势场法换道主动避撞加mpc模型预测控制carsim和simulink联合仿真
carsim与simulink联合仿真——单步垂直泊车
smart200 两种方法写的配方程序
自动驾驶控制-基于运动学模型的MPC算法路径跟踪仿真
五次多项式换道路径跟踪,carsim与simulink联合仿真
MPC轨迹跟踪法
自适应巡航控制ACC和编队matlab simulink仿真建模
直接横摆力矩控制 LQR算法
MPC无人驾驶车辆模型预测控制
车辆轨迹跟踪控制persuit动力学模型
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真
超车避幢通过五次多项式规划出超车路径
基于五次多项式的横向跟踪轨迹模型
自动驾驶控制-单点预瞄pid算法路径跟踪仿真
自动驾驶控制-斯坦利(stanely)算法路径跟踪仿真
基于五次多项式运用mpc控制算法跟踪超车轨迹
自动驾驶控制-纯跟踪算法路径跟踪仿真
MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制
自动紧急制动系统 carsim trucksim与 simulink联合AEB仿真
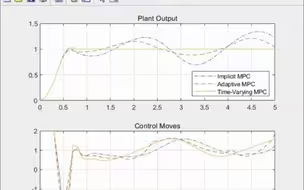
线性时变模型预测控制LTV-MPC
自动驾驶控制-基于MPC的速度控制仿真
人工势场法换道主动避撞加mpc模型预测控制
使用MATLAB和Simulink的自动驾驶汽车建模acc cacc自适应巡航协同
pure pursuit 纯跟踪算法 自动驾驶
触摸屏分期付款功能
基于PreScan Simulink的换道仿真
整车纵向控制,双PID控制实现纵向的速度和位置控制
触摸屏配方管理模板