V
主页
京东 11.11 红包
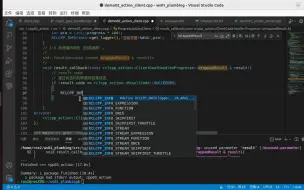
6.4.5_URDF工具
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
《ROS 2机器人开发从入门到实践》7.3.5导航过程中进行动态避障
听劝不要轻易入坑SLAM
《ROS 2机器人开发从入门到实践》7.3.6优化导航速度和膨胀半径
不会视觉,学妹说那就不用了
2.4.5_动作通信_小结
1.3.4_ROS2快速体验_运行优化
《ROS 2机器人开发从入门到实践》7 自主导航 让机器人自己动起来
3.1.4_分布式_小结
《ROS 2机器人开发从入门到实践》6.2.3使用Xacro简化URDF
4.3.4_launch之小结
《ROS 2机器人开发从入门到实践》7.1 机器人导航介绍
2.4.4_动作通信_Python实现_01框架搭建
1.6_本章小结
5.6.2_乌龟跟随(C++)_00示例浏览
1.3.3_ROS2快速体验_HelloWorld(Python)_02源码编写
ros教程(6)
机器人移动底盘
2.4.4_动作通信_Python实现_03客户端_03目标值处理
5.3.2_静态广播器_命令实现(上)
2.4.3_动作通信_C++实现_03客户端_06最终响应以及小结
【开源教程】ROS+PX4开源机械臂控制(下)
3.7.1_通信机制工具_命令工具_05ros2action
2.4.3_动作通信_C++实现_03客户端_04目标响应
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
2.2.3_话题通信_原生消息(Python)_01发布方实现
2.2.8_话题通信_小结
2.4.4_动作通信_Python实现_02服务端_02主逻辑
当叛逆期人工智能僚机不服从你的命令时,作为飞行员的你该怎么做
《ROS 2机器人开发从入门到实践》6.2.5完善机器人执行器部件
4.1.1_launch基本使用流程_01C++实现
《ROS 2机器人开发从入门到实践》6.2.6贴合地面,添加虚拟部件
3.2.2_工作空间覆盖_演示
2.2.7_话题通信_rqt查看计算图
4.1.1_launch基本使用流程_02Python实现
6.6_本章小结
3.2.1_工作空间覆盖_场景、概念与作用
2.4.3_动作通信_C++实现_02服务端_07小结
2.2.3_话题通信_原生消息(Python)_03vscode代码片段
4.3.1_launch之xml、yaml_node(上)
3.7.1_通信机制工具_命令工具_02ros2interface