V
主页
听劝不要轻易入坑SLAM
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
除了激光SLAM和视觉SLAM还有哪些研究方向
IMU究竟是个啥
【深入浅出】嵌入式终于有人给讲清楚了
IMU参数标定终于有人讲清楚了
IMU的数据为什么要滤波
SLAM大都用C++编写,为什么不用Python呢
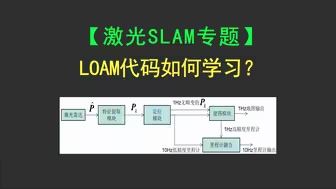
【激光SLAM专题】LOAM代码如何学习
《机器人SLAM导航核心技术与实战》书籍配套教学视频
ORB-SLAM3有必要学吗
搞SLAM算法还有前途吗
C++、ROS和SLAM是什么关系
多传感器融合的本质
【3分钟】快速了解SLAM算法的本质
最大似然、最小二乘和贝叶斯估计的区别
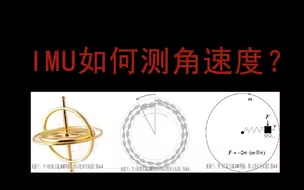
IMU如何测角速度
双目相机如何标定
IMU的数据如何采集
粒子滤波的本质
【浅显易懂】卡尔曼滤波原理解读
双目相机如何读取图像数据
先学激光SLAM还是先学视觉SLAM
机器人分布式主机是什么
机器人底盘开发很简单吗
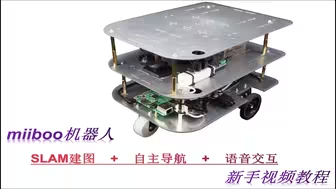
【新手视频教程】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
机器人中的IMU有什么用
ORB-SLAM2实操难吗
卡尔曼滤波的本质
基于不同双目测距算法(sgbm,psm,raft)和yolov8-seg的深度检测
【自制展示】做一款有趣的机器人+树莓派+自动导航+语音交互
搞机器人开发如何选电脑主机
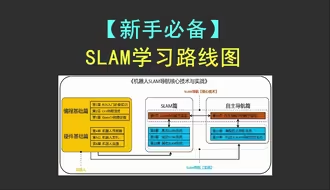
【新手必备】SLAM学习路线图
LSD-SLAM系统框架解读
【一看就懂】SLAM算法原理通俗解读
【激光SLAM专题】GMapping如何运行
激光SLAM算法有哪些
机器人SLAM为什么需要编码器
【激光SLAM专题】Cartographer如何运行
机器人轮式里程计究竟是什么
【史上最全】一图读懂机器人SLAM核心技术
图像ORB特征提取速度为什么快