V
主页
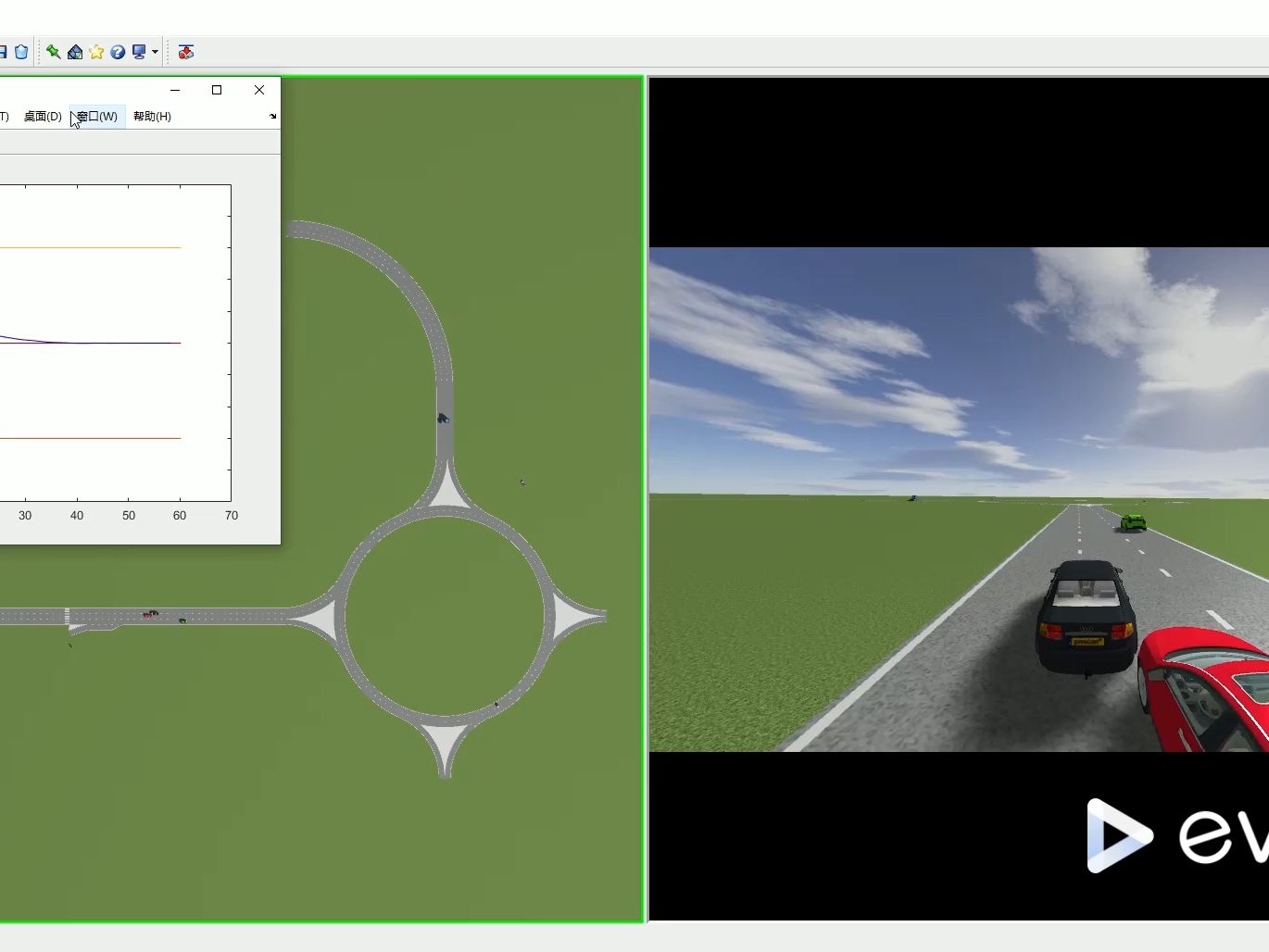
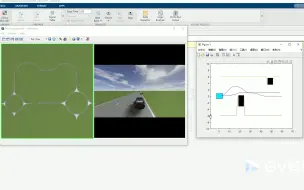
复杂场景下--规划控制联合仿真(横向MPC/LQR、纵向PID 、规划动态规划+二次规划)
发布人
上一个视频复现了老王静态场景,这里场景再复杂一些,包括静态和动态,基本满足避障、跟踪、换道功能 横向这里采用了MPC/LQR 纵向双PID 决策、规划DP+QP
打开封面
下载高清视频
观看高清视频
视频下载器
规划控制联合仿真横向(MPC/LQR纵向PID+动态规划与二次规划)
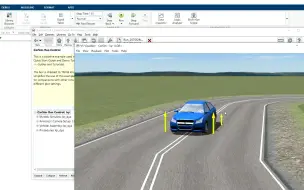
MPC跟踪控制
车辆避障MPC仿真(Model Predictive Controller)
波士顿动力 MPC 控制策略的演进与思考
横向控制
老司机也怕车位窄,看看极越的无人泊车好用么?
无人驾驶来了,司机是很难反抗科技流的
车辆MPC仿真(Model Predictive Controller)
[开源]手把手教你用ESP32做自平衡自行车
MATLAB与ANSYS Workbench联合仿真专题教程 试看章节02-案例介绍
MATLAB与ANSYS Workbench联合仿真专题教程 试看章节09-实战2-脚手架SpaceClaim脚本建模
阿维塔智驾大降价,一狠心购买后地面体验
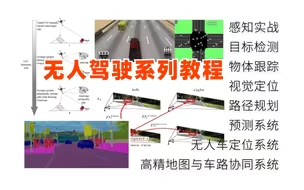
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
用MPC保证双足机器人站立站不住,不知道哪里出的问题,求教各位大佬
【第一视角POV】【檀香山轨道交通】天际线 阿罗哈体育场→东卡波利
萝卜快跑,这块出行蛋糕,到底应怎么分?
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
中交车辆·无人车项目展示车辆路试
沉浸式体验《纯》无人驾驶。
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
给循迹优化了一下,添加一点难度!
谨慎买问界,又懒又废咋办#问界新m7 #问界m9 #理想 #露营车
GNN图神经网络实战:基于GNN实现驾驶轨迹预测,论文解读+源码复现!(深度学习/计算机视觉/自动驾驶)
基于stm32的四驱智能小车遥控寻迹避障(源码+原理图)
跟着大佬25个小时吃透【无人驾驶技术】全套教程,一口气学完感知实战、视觉定位、路径规划、高精地图与车路协同、预测系统,技能点拉满!!!(自动驾驶/人工智能AI)
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
印度政治超级网红谈论:印度科技比中国差多远
5分钟回顾极越全新端到端AI智驾发布会高光瞬间!
MATLAB与ANSYS Workbench联合仿真专题教程 试看章节08-实战2-风荷载Matlab代码
错过华为海思的华强,这次无人驾驶龙回头一定要把握住!
Matlab & Fluent 联合仿真--批量计算不同马赫数和迎角下的2D翼型的升阻力系数
艹老师L3L4智能驾驶很难定义?
L4自动驾驶技术首次赋能家用车,全球唯二、中国唯一的纯视觉高阶智驾系统!
5大矿山AI全面进驻!中国矿工遇难人数大降3成!领跑全球产区!
假如萝卜快跑被入侵,后果有多么恐怖?
【自动驾驶首秀】始于群山·终入六环|北京地铁燕房线 (燕山~阎村东) 全程前方展望
无人驾驶项目实战:基于GNN图神经网络实现驾驶轨迹预测,论文解读+源码复现!(深度学习/计算机视觉/自动驾驶)
【无人驾驶】惠州首个无人驾驶公交车线路实地探访!全程时速只有30km?!
MATLAB与ANSYS Workbench联合仿真专题教程 试看章节01-课程概述
L4自动驾驶和L2比一比,极氪001 vs 萝卜快跑