V
主页
京东 11.11 红包
【论文解读+代码复现】PointNet++是点云深度学习处理方法的里程碑工作,对pytorch版的PointNet++进行原理讲解和论文复现
发布人
油管 PointNet是直接对点云进行处理的,它对输入点云中的每一个点,学习其对应的空间编码,之后再利用所有点的特征得到一个全局的点云特征。Pointnet提取的全局特征能够很好地完成分类任务,但局部特征提取能力较差,这使得它很难对复杂场景进行分析。 PointNet++核心是提出了多层次特征提取结构,有效提取局部特征提取,和全局特征。
打开封面
下载高清视频
观看高清视频
视频下载器
【已完结】3D点云 (3D point cloud) 实战解析:PointNet、PointNet++、PF-Net、GCN算法完全解读!
这也太全了!迪哥手把手带你入门【3D点云+三维重建】实战,从原理解析到项目实战 -NeuralRecon/PointNet
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
硕士生去搞计算机视觉,是纯纯的脑瘫行为!
[5分钟点云学习] #02 PointNet 开山之作
基于深度学习的特征点提取,特征点检测的方法总结
深度学习从0配置环境到复现跑通代码(全网最真实的装环境,状况百出),绝不是提前配置好。手把手教学。你一定看得懂。
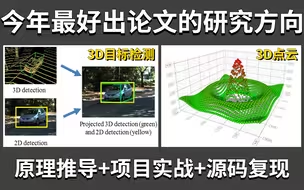
今年最好出论文的两个研究方向:多模态3D目标检测+3D点云!原理推导+项目实战+源码复现,计算机博士一次性讲透了!
【论文讲解】用点云结合3D高斯构建辐射场,成为快速训练、实时渲染的新SOTA!
基于深度学习的三维点云补全与配准研究,论文解读+实战解读!迪哥精讲三维点云算法,从入门到实战!
三维点云处理技术和深度学习在点云处理中的应用
研0和研1如何快速找论文并复现代码
一口气看完《PCL点云处理》教程
【傻瓜式】手把手教你搭建深度学习环境以及跑通Github代码(以Pix2PixGAN为例)
基于PointNet++的三维点云分割
代码终于有救啦!!!比导师教的还详细,所有代码逐行解释,人工智能领域小白必看-人工智能/机器学习/神经网络
目前B站讲的最透彻的3D点云全套教程,包含点云配准、点云分割、点云补全及PointNet算法等核心知识!强烈建议收藏!
Python深度学习:安装Anaconda、PyTorch(GPU版)库与PyCharm
找论文的复现代码,这个网站必须有!
Transformer论文逐段精读【论文精读】
膜拜!超强视觉算法【三维点云】基础算法及代码复现居然被同济大佬用大白话讲解的如此通俗易懂,这可比啃书强多了!
三维点云课程 超级详细
油管爆火!三维目标跟踪(含开源代码)_科研圈大佬亲讲【完整版3D点云】!
研究生须知:要基于pytorch做深度学习,但是我代码水平很低,我应该如何学习呢?
PointNext(强烈推荐)-建立点云网络认知的论文,看过的都说好
今年最好出创新点的两个研究方向:3D点云+Transformer模型实战教程!算法精讲+源码复现,计算机博士带你轻松搞定论文创新点!
PyTorch深度学习快速入门教程(绝对通俗易懂!)【小土堆】
别一上来就学习各种函数!这才是学习Pytorch的正确方法,迪哥手把手教你如何从零入门Pytorch框架,究极通俗易懂!
强推!入门级的研究生研究方向:三维重建+3D点云全套保姆级教程!学完论文可随便发!!!
研0和研1怎么快速找到论文代码并且复现模型代码?20分钟事无巨细的教会你!-深度学习/机器学习/神经网络
研一研二必看!如何从零复现一篇论文!迪哥一小时就教会了我如何复现论文,究极通俗易懂!
[5分钟点云学习] #03 PointNet++ 竟然是图结构?!
B站强推!2023公认最通俗易懂的3D点云教程完整版,点云配准、点云分割、点云补全、点云数据处理及pointnet算法解读,学完之后吊打面试官!计算机视觉|点云
【PointNet作者亲述】90分钟带你了解3D物体检测算法和未来方向!
【Open3D】三维点云python教程
41、ResNet模型精讲以及PyTorch复现逐行讲解
【多模态3D目标检测+3D点云】今年最好出论文的两个研究方向!从原理推导到项目实战到源码复现!华理博士一次性讲透!
最详细的 Windows 下 PyTorch 入门深度学习环境安装与配置 CPU GPU 版 | 土堆教程
我居然三天就学会了3D点云+三维重建!全靠这套教程原理解读+实战分析,讲的是真透彻易懂!——人工智能/神经网络/深度学习
自制CloudCompare点云处理从入门到精通