V
主页
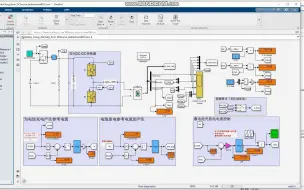
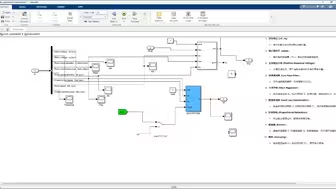
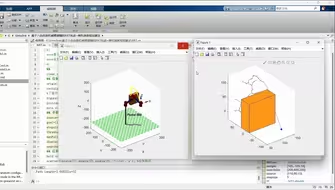
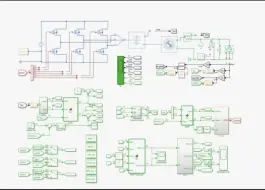
机械臂通过一系列 PID(速度环和位置环)进行电气驱动和控制六个电动机用于驱动机器人的每个关节mtalab simulink
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
PID控制、模糊控制、模糊PID控制simulink仿真对比(程序+报告)
Simulink 控制系统和 PID控制入门
KUKA机器人学习合集
基于matlab的电动汽车充电站仿真
Unity matlab 通信 机械臂控制
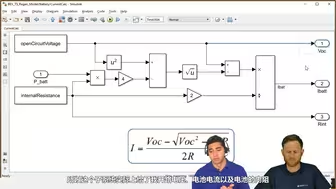
在 MATLAB Simulink 中使用恒流设计和仿真进行电池充电
通过 Simulink 和 MATLAB 中的仿真机械臂轨迹跟踪
耗时半年制作完成,大学生活越来越多姿多彩
使用 Battery Control MATLAB Simulink 对电池进行放电和充电电池管理系统锂离子电池放电充电的电池控制
电池充电放电控制器simulink仿真建模模型(DC总线PI控制器DC-DC转换器)matlab
基于Arduino PID的直流电机位置控制系统
[个人中字]使用simulink搭建车辆模型——Matlab&Simulink Racing Lounge
Picker机械臂之舒展筋骨
风光柴储 混合微电网 储能电池系统 互补能量管理matlab simulink仿真建模
有源功率因数校正simulink仿真建模包含一个级联数字控制器,用于通过升压转换器实现 pfc系列
两相混合式步进电机闭环驱动控制matlab simulink仿真
【机器人】机械臂建模开发: 如何实现机械臂和夹持器的控制以及任务调度?-MATLAB&Simulink
【机器人】机械臂建模开发: 工作流程 - MATLAB&Simulink
在 MATLAB Simulink 中使用最大功率点跟踪器 MPPT 进行光伏太阳能阵列仿真
bldc电机的六步换相 matlab simulink仿真建模模型
无人水面艇自适应滑模控制的实现usv matlab simulink仿真建模
自主车辆建模.第2部分:在Simulink中使用自适应巡航控制模块
单机无穷大系统低频震荡参数仿真avr pss
燃料电池MATLAB中的带电池存储系统的燃料电池/simulink
性价比超高的关节电机--适用机械臂、四足机器人、人形手臂
全自动化焊接机器人机械手工作站生产线
基于PID控制器的降压-升压变换器的降压-降压设计/simulink
微电网pq控制matlab simulink仿真建模
简易算法实现控制系统PID参数整定,自动调参
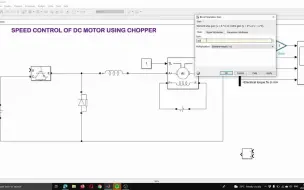
使用斩波器(闭环)控制直流电机的速度 MATLAB Simulink建模仿真
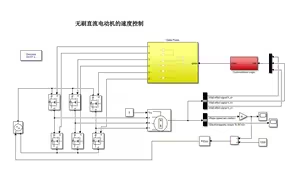
BLDC 电机的速度控制simulink仿真Speed Control Of BLDC Motor Using MATLAB_SIMULINK
模型预测控制学习资料汇总
matlab simulink仿真演示 - 在输电线路中使用过电流继电器的三相故障保护
部分遮光条件下遗传算法的MPPT-PV simulink仿真MPPT PV by GA under partial shading conditions
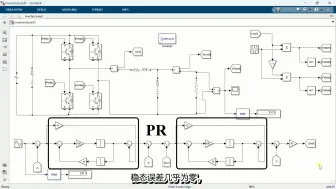
单相逆变器 MATLAB 的简单控制
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
PMSG - 永磁同步发电机俯仰角控制的MATLAB仿真simulink
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
电力系统matlab simulink中过流继电保护故障分析
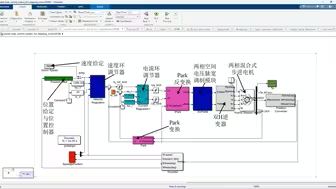
基于PMSM的飞轮储能控制策略simulink仿真采用转速电流双闭环串级控制。