V
主页
京东 11.11 红包
PCIe EtherCAT实时运动控制卡的DXF图形的CAD导图与多条运动指令的快速加工
发布人
PCIe EtherCAT实时运动控制卡的DXF图形的CAD导图与多条运动指令的快速加工
打开封面
下载高清视频
观看高清视频
视频下载器
EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动
【运动控制+机器视觉Demo软件框架系统概述】实训平台调试视频
EtherCAT运动控制卡开发教程之Qt(下):SCARA机械手正反解的建立
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
国产最优性价比的4轴网络式运动控制卡,出色的控制技术,让您的设备在自动化行业内卷中脱颖而出!
经济型EtherCAT运动控制器(十):EtherCAT总线初始化
【EtherCAT同步周期快至100us】超高实时性PCIe EtherCAT控制卡PCIE464
EtherCAT总线轴参数设置和轴运动
软件概述3
正运动技术 | 企业宣传片
【运动控制+机器视觉Demo软件框架系统概述】主界面调试视频
EtherCAT运动控制器上位机开发之Python+Qt(二):回零
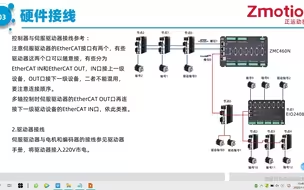
PCIe EtherCAT实时运动控制卡PCIE464的安装与调试
运动控制+机器视觉Demo软件框架(一)机械参数和配方文件的管理
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六):硬件位置比较输出和编码器锁存
8轴/4轴的EtherCAT轴模块EIO24088G-V2及EIO16084G的使用(一)TwinCAT总线配置与使用
经济型EtherCAT运动控制器(十):EtherCAT总线驱动器参数设置说明
视觉同步点胶系统——可在运动状态中实现同步跟随加工
简单易用的运动控制卡(十六):螺距补偿和反向间隙补偿
正运动技术自定义API封装例程
正运动运动器视频教程:运动控制器基础轴参数与基础运动控制指令
正运动技术CAD导图软件配合控制器的使用方法 视频教程
EtherCAT超高速实时运动控制卡XPCIE1032H:自定义电子凸轮曲线运动
运动控制器/运动控制卡配套ZCAN总线ZIO模块的使用
EtherCAT运动控制器的PLC编程(四) 电子凸轮
8轴/4轴的EtherCAT轴模块EIO24088-V2及EIO16084的使用(一):RTSys总线配置与使用
EtherCAT运动控制器Delta机械手应用
2024慕尼黑上海电子生产设备展 正运动技术展台直击
高性能EtherCAT总线运动控制器,带你玩转“8通道独立PSO”应用场景
正运动部件库的下载路径以及在eplan软件中的查看指南
机器视觉运动控制一体机应用例程(五)飞拍定位
正运动技术视频教程:正运动控制器EtherCAT总线快速入门
正运动技术PC函数库辅助库的封装
EtherCAT运动控制器在UVW对位平台中的应用
二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
运动控制器PSO位置同步输出(一)硬件环境搭建
EtherCAT超高速实时运动控制卡XPCIE1032H:项目工程下载与XML配置文件下载
正运动技术视频教程:运动控制器多轴同步与电子凸轮指令简介
EtherCAT运动控制卡的SCARA等机器人指令的应用