V
主页
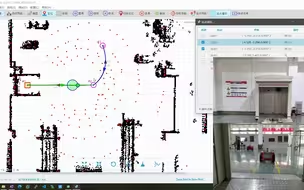
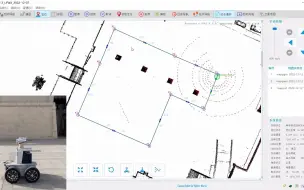
【自研3D激光导航系统】室外定位导航(RTK+Lidar融合)无限站点循环,重复定位精度3cm
发布人
室外定位导航(RTK+Lidar定位)无限站点循环,重复定位精度3cm。
打开封面
下载高清视频
观看高清视频
视频下载器
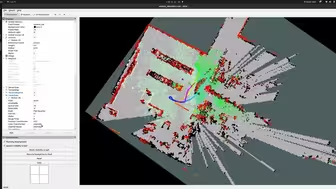
RTK+LIDAR+IMU多传感器融合建图
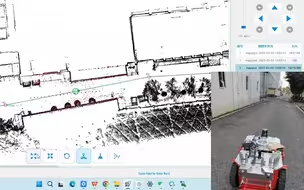
【自研3D激光导航系统】室外园区GNSS+LIDAR定位融合导航,园区内GNSS信号丢失时,测试融合定位鲁棒性
激光导航充电测试
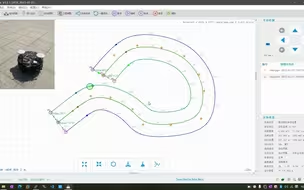
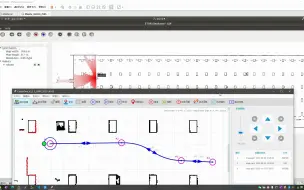
移动机器人轨迹跟踪控制,运动控制,采用速度规划跟踪直线、贝塞尔曲线
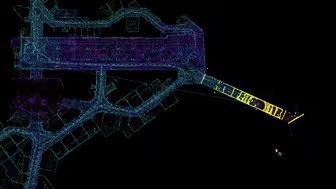
RTK+LIO室外公路建图测试
【自研3D激光导航系统】3D导航地图实时显示,大点云数据太耗内存
移动机器人定位导航系统客户园区导航测试
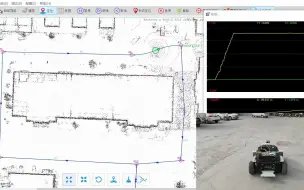
Lio-SAM融合RTK实时大规模建图测试
自研3D激光定位导航系统-室外暴力测试
自研激光导航系统客户园区建图过程
四轮四转激光导航小车
室内激光导航无限曲线测试
16线激光SLAM移动机器人导航轨迹巡线+多站点循环
全新开拓者4轮4驱底盘适配3D激光导航系统
室外RTK导航系统重磅升级,支持手动采点拟合、等距线生成、一键返回等功能
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
RTK空旷场景路径导航测试
移动机器人3D激光导航系统PLNS可提供多场景机器人平台解决方案
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
室外RTK导航系统激光雷达绕障测试
基于STDR的激光导航系统路径规划仿真测试系统
PLNS激光导航系统上位机CassieOne使用说明
【自研3D激光导航系统】PLNS空旷广场巡逻无限测试
RTK导航机器人-人工打点和数据预处理生成导航路网信息并同步到机器人端
开拓者4轮4驱底盘激光导航PLNS适配
多线激光导航系统-下雪天测试-旋转必定打滑
北斗RTK室外导航系统重磅升级,支持手动采点拟合、等距线生成、一键返回等功能
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
防爆轮式机器人[悠闲]防爆等级:Ex IIC T6.可自主建图,自主导航,自动充电,四驱独立悬挂等功能。为客户提供多场景解决方案。
PLNS 3D激光导航系统4轮4转底盘适配
基于STDR的激光导航系统运动控制仿真测试系统
Qt开发的必备
GPS 磁力计 卫星 定位 导航 第二版 冒烟 牌 飞控 第三版 STM32 F405 版本 自制飞控 四轴 无人机 小 飞机 控制 第十八季 第18集
fastlio建图与自主导航演示
0.02m分辨率,2w平建图过程说明
Qt精美登陆界面
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
基于地图搜索任意目标导航【曲线规划】+【直线规划】
弱光环境下的SLAM系统
打造地表最强个人网站,博客、导航、看电影、追剧、听歌、素材管理,一站搞定!