V
主页
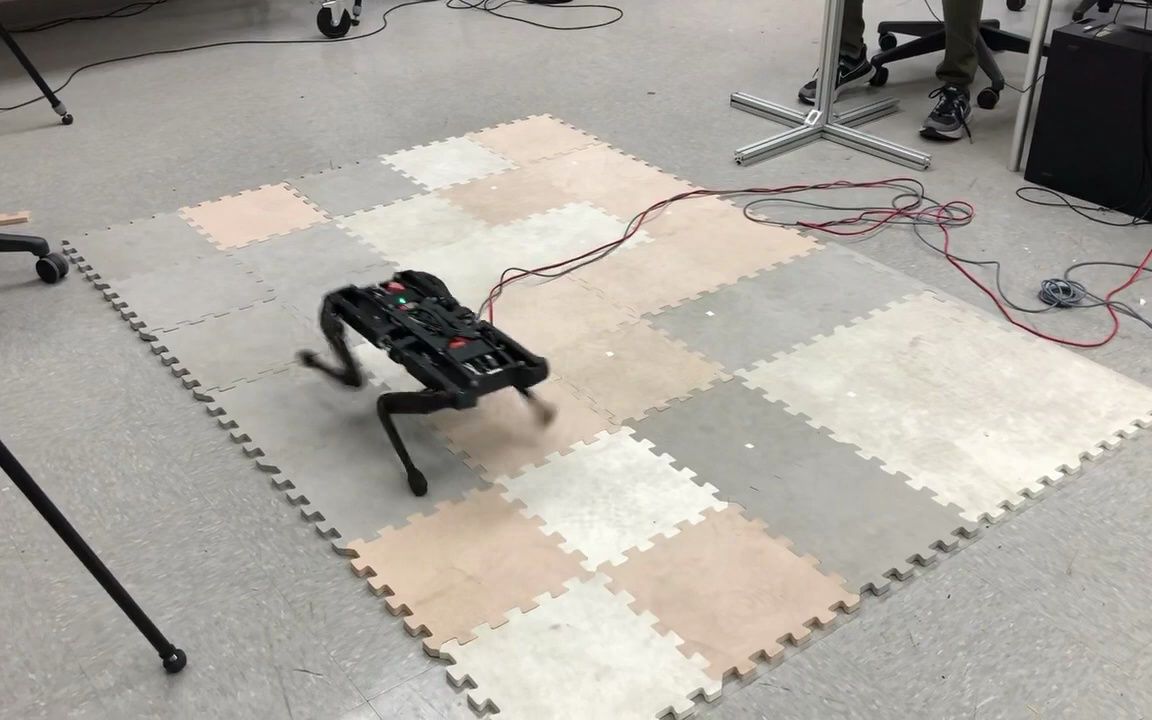
全身运动的非线性模型预测控制框架
发布人
www.youtube.com
打开封面
下载高清视频
观看高清视频
视频下载器
关节模组方案
涵盖驱动器、电机、编码器、减速机、力矩传感器、制动器等,并且可以提供机器人关节模组集成方案
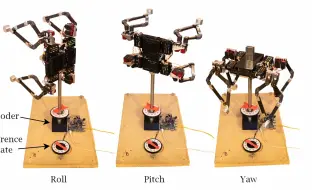
电机柔顺控制
使用Q的精确足球射门技术的分层强化学习
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
Solo-12的反应式行走控制器
有趣的关节模组再测试,深度评测(重力补偿,碰撞检测,模拟弹簧,改变阻尼)
TQ-HPR50 E-bike 电动自行车电机-内部说明
关节模组天花板配置,集成电机 编码器 驱动器 制动器,实现集成机器人的稳定可靠方案
机器人关节组装测试中
四足机器人跌落姿态调整 基于强化学习的机器人控制
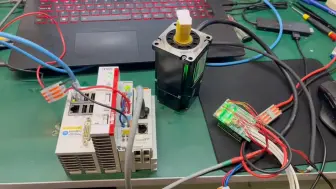
Elmo控制器加elmo驱动器控制关节模组
机器人关节模组
替代elmo驱动器横空出世,有兴趣的小伙伴可以样机测试
强化学习第一步---换个模型玩
【强化学习机器人控制】强化学习轮足机器人控制器!在几分钟内学会走路,机器狗使用大规模并行深度强化学习
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
【强化学习玩游戏】简单易懂的PPO算法及公式推导!强化学习轮足机器人控制器、月球登陆器训练+超级马里奥项目实战!
高精度伺服关节50-100测试过程
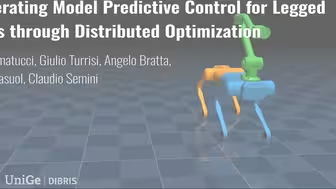
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
用于腿部关节,大扭矩行星齿轮传动机器人关节
IFAC 非线性模型预测控制主旨演讲 8月24日
上海交大张伟楠强化学习课程第16讲:基于扩散模型的强化学习
云深处四足机器人翻跟头
基于Q-learning求解机器人路径规划问题
人形机器人腿部结构 基于 4DoF 球面并联机构
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
IsaacLab+rsl_rl强化学习
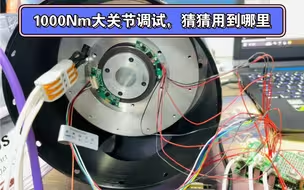
1000NM人形机器人关节调试,双编码器方案,一增量一绝对,搭配我们自研140A微型直流大电流驱动器
人形双足模仿学习强化学习AMP ASE Exbody求助
从模型预测控制到强化学习10:“直来直往-直接给策略推荐”的确策略梯度(PG)方法REINFORCE-A2C-原理与仿真
为什么Isaac gym 读取的速度不等于位置的微分呀,用pd算的力矩不就是错的吗
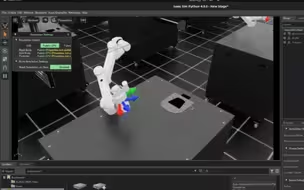
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
BECKHOFF 主站EtherCAT控制SEA驱动器历经两个小时终于成功
终于玩上了!在Isaac实现unitree H1的运动仿真
双足机器人姿态稳定实验
好大只狗狗
深度学习可视化神器:揭秘Transformer模型黑盒!
强化学习轴孔装配
完美elmo驱动器替代解决方案看这里,国内目前唯一电流覆盖广,性能强大,体积最小的微型直流驱动器