V
主页
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
发布人
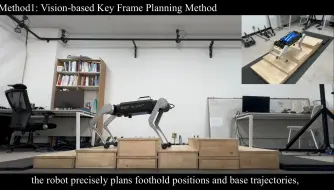
https://www.youtube.com/watch?v=XsjFNcND6js PIE: Parkour with Implicit-Explicit Learning Framework for Legged Robots Shixin Luo, Songbo Li, Ruiqi Yu, Zhicheng Wang, Jun Wu, Qiuguo Zhu Parkour presents a highly challenging task for legged robots, requiring them to traverse various terrains with agile and smooth locomotion. This necessitates comprehensive understanding of both the robot's own state and the surrounding terrain, despite the inherent unreliability of robot perception and actuation. Current state-of-the-art methods either rely on complex pre-trained high-level terrain reconstruction modules or limit the maximum potential of robot parkour to avoid failure due to inaccurate perception. In this paper, we propose a one-stage end-to-end learning-based parkour framework: Parkour with Implicit-Explicit learning framework for legged robots (PIE) that leverages dual-level implicit-explicit estimation. With this mechanism, even a low-cost quadruped robot equipped with an unreliable egocentric depth camera can achieve exceptional performance on challenging parkour terrains using a relatively simple training process and reward function. While the training process is conducted entirely in simulation, our real-world validation demonstrates successful zero-shot deployment of our framework, showcasing superior parkour performance on harsh terrains. https://arxiv.org/abs/2408.13740
打开封面
下载高清视频
观看高清视频
视频下载器
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
人形双足模仿学习强化学习AMP ASE Exbody求助
Science Robotics 发布人形机器人脸Emo(哥伦比亚大学)
在家也能造桌面级双足机器人(哥伦比亚大学硕士课程Robotic Studio)
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
真刺激,清华有个博士生都要辍学加入了
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
没错,我们来致敬波士顿动力了!Humanoid Parkour Learning
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
不平地形的摔倒恢复实验,自己的狗子实验啊,感觉又是一砸一个坑
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
【看代码】浙大FastLab无人机课程中的代码
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
四足运动:用三种不同的方法在崎岖地形上行走
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
人形机器人腿部结构 基于 4DoF 球面并联机构
我和我飞导【浙江大学FAST Lab】
山东大学机器人中心电动腿足组 | 轮式双足机器人-SKATER
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
强化学习,启动~
四轮足机器人能够适应多种复杂地形,如楼梯、斜坡等,同时保持高效的移动速度和良好的负载能力。
30岁,我在浙江大学当教授【ME32】
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
其实波士顿动力 Atlas 的转体起身动作也没多难,我们也试了一下
自制轮腿双编关节电机
【OCS2】进阶Demo也都迁移到ROS2啦
机器狗遇到并嘲笑一只真正的狗
Points2Plans:从点云到具有可组合关系动力学的长期规划
Diffusion Models for Decision Making, THU FuRoC 机器人小讲堂第三讲
仿生蜻蜓飞控理论概述
四旋翼高速抓取 软体抓手 无人机抓取
【搬】1x 的仿人机器人 NEO
西交恐怖机器狗珍贵跳跃画面
近日人形机器人发布密集,波士顿动力终于不忍了,出手就是高水平
目前机器狗的开源现状
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
AutoFusion - 无人机集群协同自主定位与实时地图重建