V
主页
vscode中配置ROS2环境
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
linux下使用vscode,cmake最简单配置调用OpenCV环境
《ROS2 机器人操作系统》实验七 Gazebo操作基础
opencv 4.8增强后的条码barcode功能
使用ROS2-Control + RL来控制四足机器人
最简单的标注yolov8-obb数据的方式!使用Mvtec DL tool
你知道怎么快速用vscode浏览github项目吗?
Go2开发教学11-ROS2 服务接口
2024年最最最详细的深度学习环境配置!各种突发情况如何解决?看完这个视频你所有疑惑一定会迎刃而解!
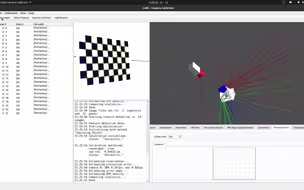
OpenCV相机标定
VSCode2024下载安装配置c/c++教程(附安装包)VSCode配置c语言使用教程,Visual Studio Code使用教程,vscode汉化教程
ROS2入门系列视频教程 (十四)| ROS2 urdf模型
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control
出入库神器!摄像头同时读取货物多个条码/一维码
必会!VSCode 最实用的快捷键
手把手教你用yolov8标注训练自己的数据集
最好用的OpenCV相机标定软件Calib Camera Calibrator
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
【闪速入门】Rasperry pico C/C++ 速通 | 第一讲 基本逻辑、GPIO输入、GPIO输出、IRQ中断
四种特殊断点,快速定位臭虫 | vscode | 调试技巧 | debug
sahi帮你的yolo检测小目标和超大图片中的目标
三天入门Linux下单片机开发之开发环境介绍(3)
opencv中的双目标定
Navigation2之自定义插件
【小技巧】vscode好用插件分享
background2.0 vscode背景美化教程
《ROS 2机器人开发从入门到实践》6.5.1ros2_control介绍与安装
Python调用C#,Python callC#,以调用halcon为例
利用Pythonnet,让C#调用Python(C# call Python by pythonnet)
超少代码实现yolov8车流量统计
用HDevengine把halcon脚本集成到C#程序中
解决Ubuntu 重新安装CUDA,出现E: 无法定位软件包 cuda
opencv直接调用yolov8,附代码
vscode远程调试单片机还能这样玩?
VSCode编程神器,函数地图
用Hdevengine把你的halcon脚本集成到C++程序里
opencv中的超级好用“抠图”函数grabcut,附代码
WebStorm它免费了!我原本的计划也暂时泡汤了!
《ROS 2机器人开发从入门到实践》7.3.2编写launch并启动导航
mvtec 官方halcon双目标定教学视频,附代码,中文字幕
Linux安装Tensorrt