V
主页
京东 11.11 红包
1.0_ROS2概述与环境搭建_引言
发布人
第一章概述
打开封面
下载高清视频
观看高清视频
视频下载器
【赵虚左】百度Apollo智能驾驶课程
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
【Autolabor初级教程】ROS机器人入门
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
ROS快速入门教程
机器人操作系统 ROS 快速入门教程
重磅!ROS1官方已停止维护,全新ROS2机器人操作系统,用过再也回不去了!
【布兰自动驾驶】ROS2机器人基础教程:理论与实战
ROS2理论与实践
1.2.1_ROS2安装_步骤4安装
1.2.0_ROS2安装_引言
1.2.1_ROS2安装_卸载方式以及小结
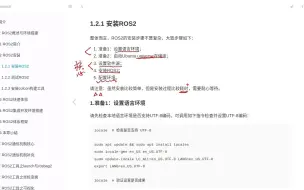
1.2.1_ROS2安装_步骤1设置编码
1.4.2_集成开发环境搭建_安装terminator
1.2.1_ROS2安装_步骤3设置软件源
6.0_ROS2工具之可视化_引言
1.1.0_ROS2简介_ROS诞生背景
1.2.1_ROS2安装_步骤5配置环境
1.2.2_ROS2安装_测试ROS2
1.1.4_ROS2简介_小结
ROS2课程答疑
1.1.1_ROS2简介_ROS2发展历程
1.1.2_ROS2简介_ROS2组成体系
零基础玩转机器人操作系统ROS2
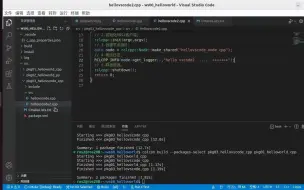
1.3.3_ROS2快速体验_HelloWorld(Python)_01基本流程
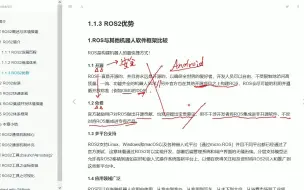
1.1.3_ROS2简介_ROS2优势_01横向比较
1.4.1_集成开发环境搭建_VSCode_04程序编写
ROS2机器人建图之cartographer算法
1.4.1_集成开发环境搭建_VSCode_01下载安装以及启动
1.5.1_ROS2体系框架_文件系统_01概览
1.2.3_ROS2安装_安装colcon构建工具
1.3.1_ROS2快速体验_案例简介
1.4.1_集成开发环境搭建_VSCode_03includepath配置
2.1_ROS2通信机制简介_01节点与话题
1.1.3_ROS2简介_ROS2优势_02纵向比较
4.0_ROS2工具之launch文件与rosbag2_引言
1.2.1_ROS2安装_步骤2启动universe存储库
1.3.2_ROS2快速体验_HelloWorld(C++)_01基本流程
2.0_ROS2通信机制核心_引言
1.4.1_集成开发环境搭建_VSCode_05自修改配置文件