V
主页
1.2.1_ROS2安装_步骤1设置编码
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】低成本DIY自动驾驶小车
ROS 颜色目标识别与定位的 Python 实现
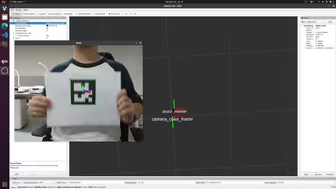
【考核用】调用opencv识别aruco码,在ros中更新tf
1.2.1_ROS2安装_步骤2启动universe存储库
《ROS 2机器人开发从入门到实践》4.4.1参数声明设置
ROS2自动驾驶|边做边学(二)地图与定位
ROS 人脸检测的 Python 实现
《ROS 2机器人开发从入门到实践》4.1.2基于服务的参数通信
1.2.1_ROS2安装_步骤4安装
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
调车总不能炸机了吧(●'◡'●)
【全108集】(允许白嫖)一套可能是B站最系统的公务员教程,手把手教学,通俗易懂,让你自学公考不再走弯路!
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
1.2.1_ROS2安装_步骤3设置软件源
1.1.4_ROS2简介_小结
无人机定位与导航
宇树K1机械臂的视觉抓取仿真
6.2_rviz2基本使用02_插件以及配置文件
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
强化学习在ROS2中实现巡线小车
(开源)哪吒ROS2 -快速上手案例 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建图导航、自动驾驶、服务、智能救援机器
《ROS 2机器人开发从入门到实践》2.5.2用得到的C++新特性
《车规级激光雷达OusterOS0-64》
《松灵ROS 2开讲啦》第六期 Nav2导航应用
1.2.3_ROS2安装_安装colcon构建工具
《ROS2 机器人操作系统》实验一:ROS2 的安装
ROS机器人基于gmapping的slam自动导航建图!
《ROS 2机器人开发从入门到实践》4.2.1自定义服务接口
自制ros建图导航机器人2
ROS2版DUMMY - 目标(末端位姿)跟随 - Gazebo仿真 CPP程序控制pose实时反馈 Moveit2实时规划
《ROS 2机器人开发从入门到实践》 2.4 多功能包的最佳实践WorkSpace
1.3.4_ROS2快速体验_运行优化
基于yolo和moveit的图像识别机械臂目标抓取搬移
《ROS 2机器人开发从入门到实践》4.3.3客户端代码实现
ROS2机器人多点导航与动态避障
1.2.2_ROS2安装_测试ROS2
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
《ROS 2机器人开发从入门到实践》3.4.3系统信息获取与发布
【开源无人船】从零组装一艘开源ROS无人船
【OCS2】进阶Demo也都迁移到ROS2啦