V
主页
ROS仿真器实战:4-1导航仿真器概述
发布人
开源地址:https://github.com/cf-zhang/nav_simulator 如果觉得课程有用,希望朋友们点赞关注分享出去。你们的支持将化为我不竭的动力。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS仿真器实战:4-2 机器人架构与导航架构的解析
ROS仿真器实战:1-4 仿真器成品演示
ROS仿真器实战:4-3 导航仿真器功能集概览
ROS仿真器实战: 9-1 里程计坐标系与里程计
ROS仿真器实战:2-2 ROS环境验证及Nav2的安装验证
机器人导航算法应该怎么学(1)
ROS仿真器实战: 6 遥控器
ROS仿真器实战:2-1 安装ROS到底对系统做了什么
ROS仿真器实战: 7 地图与坐标系
ROS仿真器实战: 8-1 路径规划仿真器效果
ROS仿真器实战:5 虚拟时钟
ROS仿真器实战:1-1 概述
ROS仿真器实战: 9-0 八卦一次因里程计而失败的面试经历
ROS仿真器实战: 8-4 straight路径规划器插件
ROS仿真器实战: 8-2 路径规划服务器
学到了这些,证明你已经掌握了ROS的基本技能
ROS仿真器实战: 10 终章-实现导航全流程验证
机器人导航算法应该怎么学(2)
第25讲:Egoplanner集群仿真
ROS机器人导航混合A星规划器hybrid_astar
汽车设计开发之平台架构开发概述
ROS仿真器实战: 8-3 路径规划与RVIZ的桥接器
ROS路径规划——固定区域的U型路径约束
《松灵ROS 2开讲啦》第七期 ROS 2的导航参数调整及应用
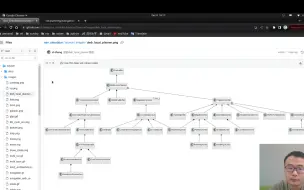
navigation2的工程化担当:dwb_local_planner类图拆解
ROS仿真器实战: 9-2 机器人重定位过程讲解
也是玩上ROS了
ROS仿真器实战:3-3 CMakeList.txt文件解析
ROS仿真器实战: 8-5 利用仿真器验证规划效果
【开源无人机】零基础首飞一架开源无人机
学习ROS,如何有效利用wiki
ROS仿真器实战:3-2 package.xml文件解析
【开源无人船】从零调试一艘开源无人船
ROS仿真器实战:1-2 为什么从仿真器切入
ROS仿真器实战:3-1 工作空间与Package创建
第1讲:仿真平台框架介绍
ROS仿真器实战:1-3 课程规划及学习前提
C++单元测试gtest的介绍及其在ROS中的应用实战(十)
机器人竞赛基础技术讲解(2)-9月18日
C++单元测试gtest的介绍及其在ROS中的应用实战(三)