V
主页
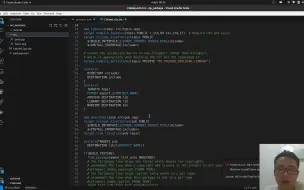
C++单元测试gtest的介绍及其在ROS中的应用实战(三)
发布人
《C++单元测试gtest的介绍及其在ROS中的应用实战》 整理文件的时候从角落里翻出了2017年给组内小伙伴培训单元测试的资源。 视频里代码实战部分是基于ROS1 Kinetic版本。 希望能对大家有帮助。 感兴趣的小伙伴可自行获取视频内容相关的资料包: 链接: https://pan.baidu.com/s/1vGXj6pVKLSgtduqfPkBSsQ 提取码: fzqz 复制这段内容后打开百度网盘手机App,操作更方便哦
打开封面
下载高清视频
观看高清视频
视频下载器
C++单元测试gtest的介绍及其在ROS中的应用实战(二)
C++单元测试gtest的介绍及其在ROS中的应用实战(一)
C++单元测试gtest的介绍及其在ROS中的应用实战(六)
C++单元测试gtest的介绍及其在ROS中的应用实战(四)
ROS仿真器实战: 7 地图与坐标系
ROS仿真器实战:3-3 CMakeList.txt文件解析
ROS仿真器实战:1-1 概述
ROS仿真器实战:4-1导航仿真器概述
ROS仿真器实战:1-2 为什么从仿真器切入
学习ROS,如何有效利用wiki
ROS仿真器实战: 8-2 路径规划服务器
ROS仿真器实战:4-3 导航仿真器功能集概览
ROS仿真器实战:5 虚拟时钟
学到了这些,证明你已经掌握了ROS的基本技能
ROS仿真器实战:2-1 安装ROS到底对系统做了什么
ROS仿真器实战: 8-4 straight路径规划器插件
ROS仿真器实战: 6 遥控器
ROS仿真器实战: 9-1 里程计坐标系与里程计
ROS仿真器实战: 10 终章-实现导航全流程验证
ROS仿真器实战:2-2 ROS环境验证及Nav2的安装验证
ROS仿真器实战:1-4 仿真器成品演示
机器人导航算法应该怎么学(1)
分享几个ROS简单的脚本
机器人竞赛基础技术讲解(2)-9月18日
剖析Costmap2D类图结构
测试如何使用 Apifox
基于规则的路径规划
A*与势场法结合的路径规划算法的直观感受
ROS2功能包与三大通信机制编程
第24讲:解决Ego在仿真中不能运行的问题
ROS仿真器实战: 8-1 路径规划仿真器效果
深夜录制,软路由ROS使用脚本自动获取并更新IP地址
ROS路径规划——固定区域的U型路径约束
ROS中实现reedshepp曲线作为机器人路径规划器
【开源无人机】从零调试一架开源无人机
ORB-SLAM2实操难吗
ROS仿真器实战: 9-2 机器人重定位过程讲解
思维整洁之道,软件工程之屠龙宝刀
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
ROS机器人导航优选路径规划器(同方向时磁吸效应)