V
主页
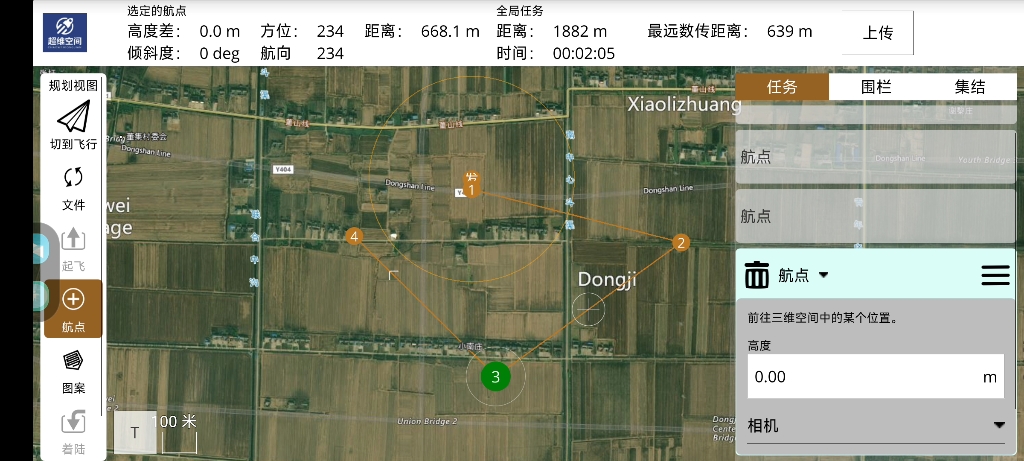
无人船规划航点
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
8.1、无人车/无人船硬件平台搭建与调参
无人船防碰撞测试
ROS无人船Offboard巡航
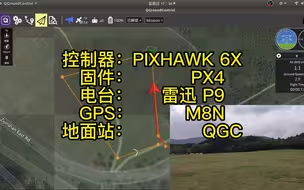
px4无人船航点实验
开源PIX无人车室内巡线
从零搭建自主pix无人车(三):室外航线规划
2024世界机器人大会WRC,国内最顶尖的人型机器人展示……宇树科技,星动纪元,加速进化……
超维USV-M1500无人船航线测试
从零搭建自主pix无人车(四):Apm和ROS通信
4G远程控制无人船
无人车航点实验
ROS无人船操作步骤
超维小课堂(七)APM无人船(车)装机调试
超维Mbot测绘无人船
ROS+PX4学习与开发 1.9-ROS无人船的组装
开源无人船自主避障演示
无人船RTK基站使用教程
从零搭建自主pix无人车(一):课程简介
超维小课堂(十八):PX4无人船使用教程
超维小课堂(十九):PX4无人车(船)OFFBOARD自主控制
ROS+PX4学习与开发 2.0 ROS与PX4的通信
超维小课堂(二十二):APM无人船设置返航点
3、无人机硬件平台搭建
从零搭建自主pix无人车(二):硬件结构简介
超维小课堂(二十三):APM无人船(车)使用双天线RTK定航向
自制无人机灯光秀(四):实机航点上传
PIXHAWK无人车自动航线运行
ArduPilot二次开发零基础教程(四):无人船 (车) MAVROS自主控制接口
超维“天鹅一号”无人天鹅自动巡航
无人船连接手机地面站
USV-M800无人船集群通信演示
无人机比赛专栏——5、识别降落
致命穿透,伤害返弹!“泰坦克星”霍克即将登场!#机甲战队 #新版本来袭 #新机甲来袭
超维“天鹅一号”无人天鹅编队
8.2垂起固定翼硬件平台搭建与调参
【开源无人机】从零启动mavros,打通ROS与PX4通信
【2025 ROBOCON国际赛】比赛规则-官方发布原版(无字幕,英语越南语杂交版)
超维小课堂(二十一):APM无人船(车)装机教程(QGC地面站
010、无人船巡航与结构讲解
手把手教你无人机编队(一):概述