V
主页
京东 11.11 红包
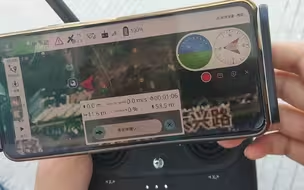
无人船连接手机地面站
发布人
无人船使用教程(一)连接手机地面站
打开封面
下载高清视频
观看高清视频
视频下载器
【开源无人船】4G远程控制无人船
【开源无人船】1.6米双体船自动巡航
【开源无人船】开源无人船自主避障演示
【开源无人船】无人船规划航点
【开源无人船】ROS无人船操作步骤
【开源无人船】从零搭建多功能测绘无人船(一):课程简介
【开源无人船】从零组装一艘测绘无人船
【开源无人船】ROS无人船自主控制
PIXHAWK无人车自动航线运行
【开源教程】ROS无人船避障代码讲解
【开源无人船】无人船RTK基站使用教程
【开源无人机】从零搭建无人机集群通信网络(基于wifi)
8.1、无人车/无人船硬件平台搭建与调参
从零搭建自主pix无人车(二):硬件结构简介
【开源无人船】ROS无人船Offboard巡航
【开源无人船】超维USV-M800无人船双船编队测试
自制无人机灯光秀(三):地面站软件使用
从零搭建自主pix无人车(三):室外航线规划
【开源无人船】从零搭建多功能测绘无人船(三):测深仪数据后处理
【开源无人船】测深船测试
手把手教你无人机编队(五):多机地面站5.2 GPS原点初始化
【开源无人船】自主巡航渔保喷洒无人船
【开源无人船】从零组装一艘开源ROS无人船
无人机比赛专栏——4、穿越圆框
【开源教程】ROS+PX4开源机械臂控制(上)
pixhawk无人车自主避障
超维小课堂(二十一):APM无人船(车)装机教程(QGC地面站
从零搭建自主pix无人车(一):课程简介
【开源无人船】010、无人船巡航与结构讲解
无人机比赛专栏——5、识别降落
【开源无人机】rtk测深船
手把手教你无人机编队(五):多机地面站5.4 matlab通信接口
无人机比赛专栏——1、代码讲解
妈妈再也不会担心我不会开船了
超维小课堂(十八):PX4无人船使用教程
QGC二次开发入门(十):换地图
【开源无人机】船机协同测试
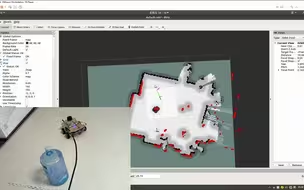
ros+pixhawk无人车建图导航
【开源无人船】px4无人船航点实验
【开源无人机】从零调试一架开源无人机