V
主页
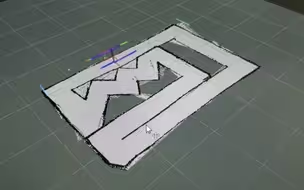
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学
发布人
https://www.youtube.com/watch?v=yunBYUACUdg 他们提出了一些算法和实现增强,即使在资源受限的平台上,计算速度也会显著提高(平均提高5倍)。速度的提高使他们能够以更高的帧速率处理图像,从而在快速运动时提供更好的结果。 论文地址:https://arxiv.org/pdf/2203.08182.pdf 代码地址:https://github.com/versatran01/dsol
打开封面
下载高清视频
观看高清视频
视频下载器
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
【CMU开源】数千美元的设备即可提供百万美元级的地图质量!无GPS下,高精度地图合并!
无人机应用于精细化农林业丨宾夕法尼亚大学的GRASP实验室项目
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
SLAM入门简介及ORB-SLAM2论文精讲
ICRA2022|单个360°相机的视觉里程计,无需校正即可获得全方位感知!港科大发布
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
【毕设有救了】终于有人把OpenCV最新最全实战项目讲清楚了,学习计算机视觉图像处理必备,练完即可毕业,毕设有救了
【最新开源】照片修复大师上线了,一键即可修复受损图片!南洋理工大学新研究,CVPR2022
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
立体匹配算法原理与应用-奥比中光
终于画出来咯
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
【六哥答疑】建立稠密地图的视觉SLAM,目前效果最好的开源算法有哪些?
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
点云还能做预言家了?!德国波恩大学最新开源,自监督的三维点云预测!CoRL2021
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
【直播回放】多传感器融合方案介绍
太全了...!从入门到进阶,一口气学完YOLO目标检测算法!存下吧,内含SSD、FasterRCNN、FastRCNN、SPPNet、RCNN等YOLO全部干货
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
【2024】最全YOLO课程,带你从零开始入门YOLOv1-YOLOv10,小学生都看懂了!人工智能/目标检测/YOLOv10/v9/v8/v7/v6/v5
强!手机平板上都可实时高效渲染的神经辐射场,谷歌新开源MobileNeRF!
【直播回放】VINSMono+Fusion 论文详解
手把手带你入门SLAM
【直播回放】一个本科生从小白到菜鸟的SLAM进阶之路
CMU新开源|改进27.7%的误差,首个处理动态环境的监督学习VO方法!ICRA2023
2021年度盘点:十大最佳开源SLAM算法!
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!
【最新开源】快稳准!视频实例识别,赛车场都能应用!ECCV2022
动态SLAM论文综述讲解(含30+论文下载)!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
好神奇,一键即可变笑脸!面部、眼睛、嘴和头发均可任意改变!最新开源!