V
主页
手把手带你入门SLAM
发布人
小六:中科院博士、多年视觉SLAM从业经验、计算机视觉life公众号创始人。课程讲解细致,善于将复杂的原理用图表具象化,帮助学员快速理解复杂的源码并理解背后的物理意义,教学耐心仔细,广受学员好评。 ————————————————— 感兴趣的同学可以扫码片尾二维码添加工作人员,获取更多海量资料,还有高质量行业交流群哦~
打开封面
下载高清视频
观看高清视频
视频下载器
经验分享:我的SLAM学习之路-答疑交流
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
深度学习三维重建和传统重建有何不同?如何配置运行环境?
【直播回放】SLAM常见面试问题浅析
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
【直播回放】一个本科生从小白到菜鸟的SLAM进阶之路
对于SLAM小白,前辈有什么推荐的学习经验?
【科研自救指南】同济大佬手把手教你如何高效阅读文献及笔记整理-SCI论文、顶会论文、文献阅读
【SLAM前沿讲座】MIT|鲁棒语义SLAM:表现和推理
【3D数学】欧拉角万向节死锁与插值
ORB-SLAM2实操难吗
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
深度学习三维重建学习计划
【直播回放】机器人SLAM年度答疑手册发布
【线下讲座】占云龙:SLAM技术发展与存在的问题
【直播回放】2022届秋招面试心路历程分享:SLAM方向
【SLAM前沿讲座】佐治亚理工|用于感知和行动的因子图
Stereo Vision——立体视觉论述+标定+校正
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
【原创】上海为什么能够后来居上,成为人工智能人才的引力场?
【强推】B站最全的【Transformer教程】中科院56集付费课程,最适合新手入门Transformer模型实战系列,绝对通俗易懂!
【C++面试100问】第九十九问:char*和char[]的区别是什么
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
【强推】这绝对是B站2024年人工智能入门的天花板教程!不接受任何反驳,听懂人话就能学会!(人工智能|AI|机器学习|深度学习|)
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
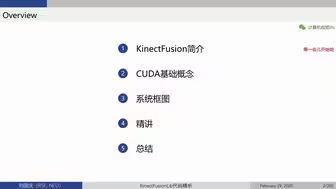
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
【直播回放】相机标定入门、探讨和思考
冒死上传!这个【MATLAB神经网络和优化算法】教程!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
【200集全】CV十天入门到起飞!一口气学完Python、OpenCV、深度学习基础、PyTorch、卷积神经网络、物体检测、图像分割等计算机视觉必备基础与实战
如何写出一篇学术论文,从构思到发刊教程
【全568集】清华大佬一周讲完的AI大模型,通俗易懂,2024最新版!7天学完从入门到进阶实战,专为零基础小白研制AI大模型课程,存下吧,很难找全了!!
【SLAM前沿讲座】密歇根大学|面向海洋机器人感知的深度学习
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
第25讲:Egoplanner集群仿真
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
2022年度盘点:优秀SLAM开源方案