V
主页
LimX Dynamics P1:越野双足机器人,超强的平衡能力适应各种复杂的地形
发布人
LimX Dynamics LimX Dynamics P1 机器人是一款由逐际动力(LimX Dynamics)研发的双足步行机器人,该机器人基于强化学习技术进行设计和优化。P1 机器人在野外测试中展示了其控制力和稳定性,成功通过了测试。这表明P1 机器人能够适应复杂环境,并在没有人类直接干预的情况下自主行走。
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人角色的设计与控制
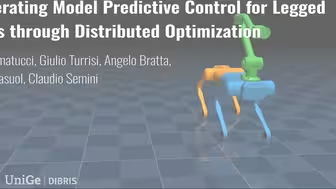
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
LOOI桌面机器人待机的时候会做什么?
桌面人形机器人 步距突破500毫米走6步 最大步距可以到90毫米 3D打印双足机器人
宇树科技的竞争对手 | 中国深圳机器人公司 | 逐际动力 | 融资超2亿元 | 开发3款机器人产品 | 了解逐际动力 怎能错过这个视频 | 云深处科技
2024世界机器人大会现场,开上“高达”了~
人形机器人远程视觉操纵 论文和代码在简介
稳定的站立
山东大学机器人中心电动腿足组|人形机器人运动与全身控制
开源六轴机械臂组装教程
人形机器人远程视觉操纵
《威廉up自制机械骨架深情演唱》
【开源】低成本DIY自动驾驶小车
走一走,摔一摔
【白嫖】PMSM永磁同步电机参数辨识仿真模型
宇树科技人形机器人 G1 | 强大的运动能力 电驱全球第一 | 美国波士顿动力 你还不出招 | Atlas | S1| 星尘智能 | 智能机器人 | 人工智能
桌面人形机器人行走再优化 动作更流畅 行走更稳定
风力发电机的原理
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
迪士尼乐园的机器人为什么这么逼真
来自挪威的家用人形机器人 NEO | 全球 最安全 最像人类的 机器人 | 它可以进入家庭 成为人类的保姆 | 人形机器人 | 智能机器人 | 人工智能
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
塑胶地面行走
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
10期摩托车打滑陷车越野
超简单画图实现自动化脚本,支持yolo识别ai级
人形机器人现场鲁棒性测试
中央音乐学院由Ai作曲 Ai指挥《欢迎》
华北理工大学ROS2智能机器人算法 实验一
用Midjourney 和 AE 制作的AI动画MV
一个谷歌Chrome浏览器扩展插件,在网页上选择任意图像,并根据提示词生成各种风格的混合图像
免费视频生成AI工具——PixVerse像素宇宙3D风格动画生成滤镜模块
做了一个时速超过一百每小时的扫地机器人
【克隆机器人大乱斗】一条命通关无限巨剑挑战!
机械手,机械臂,线驱机械手指,遥控机动战士高达
TextureDreamer:将纹理从几个图像传输到任意 3D 模型,3D 贴图轻松搞定
stm32,pid寻迹小车,南昌航大
机器人活了!
Midjourney V6加上Runwayml gen 2 会出现什么效果?