V
主页
京东 11.11 红包
LeRobot的大佬Alexander Soare讲解TD-MPC(2操作细节部分)
发布人
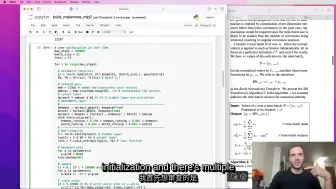
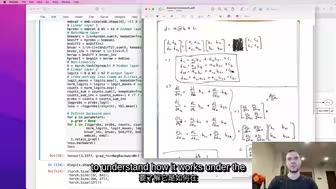
详细介绍了多智能体规划(MPC)和相关技术。首先,讨论了MPC接收状态和动作的模型及其预测能力,接着介绍了机器人必须完成的任务及其依赖的Q函数。此外,阐述了NPC机制、奖励设置、状态动作值函数以及交叉熵方法作为底层算法。在TDMC方法中,描述了观察编码器或状态编码器的作用,以及如何将状态转换为潜在表示。3D MPC的步骤也被详细说明,包括从现在到最后的场景图像和联合机器人的角度。Z代替s的原因和潜在维度的意义也得到了探讨。策略模型和目标模型被介绍,并解释了它们如何接受函数和进行预测。网络更新步骤、奖励设置以及使用MPC进行推出操作的过程也被阐述。数据集的生成方式、交叉熵方法以及策略网络和Q网络在训练中的作用也进行了讨论。优势加权回归和探索与利用的平衡问题通过MPC进行探索。强化学习中的Q网络和V网络的应用、时间差分(TD)学习算法、Q网络损失函数、神经网络优化以及Hugging Face项目的训练循环也被详细介绍。最后,讨论了神经网络训练的过程,包括数据收集、模型训练、性能评估以及相关的技术细节。
打开封面
下载高清视频
观看高清视频
视频下载器
hil-serl训练全能机器人
人形机器人为什么需要腿,轮式不行么?
LeRobot的大佬Alexander Soare讲解TD-MPC(1原理部分)
通向AGI之路
SkillMimicGen:一个用于从少量人类示范中自动生成演示数据集的系统
Meta(Facebook)十年磨一剑 发布世上最强AR眼镜
Mark Zuckerberg 创造的未来是这样的
“人工智能的未来已到来”——李飞飞揭示人工智能的下一前沿(AI翻译)
马克·扎克伯格谈人工智能的未来、他的编程生涯以及Orion AR
Andrej Karpathy大神的从头构建LLM系列-2(MLP)
Andrej Karpathy大神的从头构建LLM系列-3(Activations & Gradients, BatchNorm)
为什么Diffusion模型比自回归模型生成效果要好?
Andrej Karpathy大神的从头构建LLM系列-4( Becoming a Backprop Ninja)
Andrej Karpathy大神的从头构建LLM系列-1
机器人看一下就学会
【搬】奥特曼定义AGI
AI先锋李飞飞在普林斯顿预读大会上激励新生
你未来的家庭助手,真正的家务机器人
使用更智能的人工智能来增强人类大脑
【秋叶SD整合包11月最新版】全网最新!Stablediffusion保姆级教程 秋叶大佬SD教程 AI绘画人工智能SD启动器AIGC零基础入门到精通
使用基础模型可验证地执行复杂的机器人指令
AI接管你的电脑,你不再需要鼠标和键盘
波士顿动力的Stretch下工厂搬砖lo
如果你能打败我的石头剪刀布机器人,将赢得$10,000
Andrej Karpathy大神的从头构建LLM系列-0
Google X的前首席商务官Mo Gawdat 谈人工智能人工智能的未来及其如何塑造我们的世界
DiPPeST:基于扩散的路径规划器用于四足机器人轨迹合成
你对AR/VR的未来想象是什么?
这不是科幻而是未来,机器狗帮助人刷牙
量子如何应用于航空
Lipschitz约束策略
基于Isaac Sim虚拟环境的机器人自主探索
Atlas开始搬砖啦
Andrej Karpathy大神带你一步步搭建GPT2模型
终极机器人之战#机器人(中文音译)
Figure02最新灵巧手泄露,采用模块化设计,拥有12个自由度。#figure02灵巧手 #机器人 #科技 #人工智能
【纪录片】机器人小组2024 ROBOCON比赛纪录片
机器鸟
【2024全站首发V5.0 秋叶SD教程】最详细最全面的Stable Diffusion教程!零基础入门到精通!综合案例实战,AIGC人工智能(附SD最新安装包
【手把手教做轮足机器人】7_滚转姿态控制【原理讲解+代码开源】