V
主页
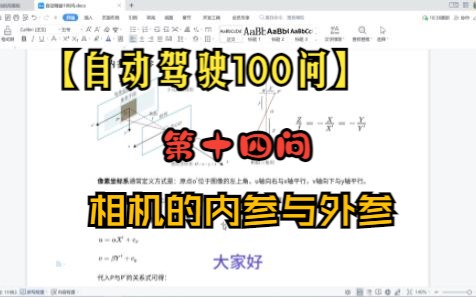
【自动驾驶100问】第十五问:相机的内参与外参
发布人
UP是《学习OpenCV4:基于Python的算法实战》和《深度学习计算机视觉实战》两本图书的作者,目前从事自动驾驶感知融合与SLAM建图算法开发,分享内容包括深度学习、计算机视觉、OpenCV、自动驾驶、SLAM、C++/Python语言开发等方向的内容。 欢迎关注公众号“计算机视觉与OpenCV”(分享内容会发在这里) 欢迎添加我的微信号study428讨论交流。
打开封面
下载高清视频
观看高清视频
视频下载器
打 倒 一 切 反 贼 ! 第一集
【自动驾驶100问】第十七问:SLAM学习路线分享
【自动驾驶100问】第二十八问:相机畸变描述与校正详述
自动驾驶感知算法(SLAM和融合)学习路线分享
【自动驾驶100问】第十一问:针孔相机模型
【自动驾驶100问】自动驾驶算法应该如何入门
【自动驾驶100问】第十二问:旋转矩阵和变换矩阵的区别是什么
【C++面试100问】第四问:C++常用新特性有哪些,请举例说明?
【自动驾驶100问】第十九问:IMU介绍
【C++面试100问】第六十七问:C/C++中字符串与数字如何互转?
C++学习路线分享
【C++面试100问】第八十五问:有了const,C++11为什么还要引入constexpr
【C++面试100问】第六问:内存泄漏是什么,有哪几种,怎么解决?
【自动驾驶100问】SLAM算法工程师需要掌握哪些内容
视觉SLAM进阶-从零开始手写VIO
【C++面试100问】第七十六问:vector的resize和reserve的区别是什么?
【C++面试100问】第七十九问:this指针有什么用?怎么用?
【零基础看懂SLAM】SO(3)对应的李代数so(3)详细推导
【C++面试100问】第二问:常量指针和指针常量分别是什么意思?
无人机SLAM入门教程(一):课程概述1.2 预备知识概览
【自动驾驶100问】第九问:SLAM是什么?
【C++面试100问】第四十问:C++中什么是完美转发?什么是万能引用?
【C++面试100问】第六十六问:RAII是什么?应该如何应用?
无人机SLAM入门教程(一):课程概述1.6 后端优化
【深度学习100问】第一问:超参数有哪些,如何调优?
【自动驾驶100问】第四问:简要介绍一下回环检测
【C++面试100问】第八十问:拷贝构造函数的第一个参数为什么要是引用类型?
【成果展示】室外室内实景三维重建、SLAM与精确测量——复杂环境快速勘测与精确三维重建,适用于水电验收,房屋维护、测量取证、数字孪生、建筑保存、复杂地理环境评估
【自动驾驶100问】第二十二问:移动模型建模有啥作用?
【C++面试100问】第十二问:哈希冲突如何解决?
【自动驾驶100问】第十问:点云配准是什么
【自动驾驶100问】第二十七问:细细说说最小二乘法
腾讯后台开发面试需要什么技术栈?想进鹅厂的赶快点赞投币收藏吧!
C++各方向开源库和资源最全总结,只有理论没有项目学习源码有很大的帮助
【自动驾驶100问】第三问:自动驾驶系统介绍
【C++面试100问】第六十九问:一图说清楚虚拟地址
【自动驾驶100问】第五问:自动驾驶相关的数据集有哪些?
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
【视觉算法100问】第一问:请讲讲霍夫线变换是怎么实现的?
【C++面试100问】第二十八问:C++中的多态是什么样的?