V
主页
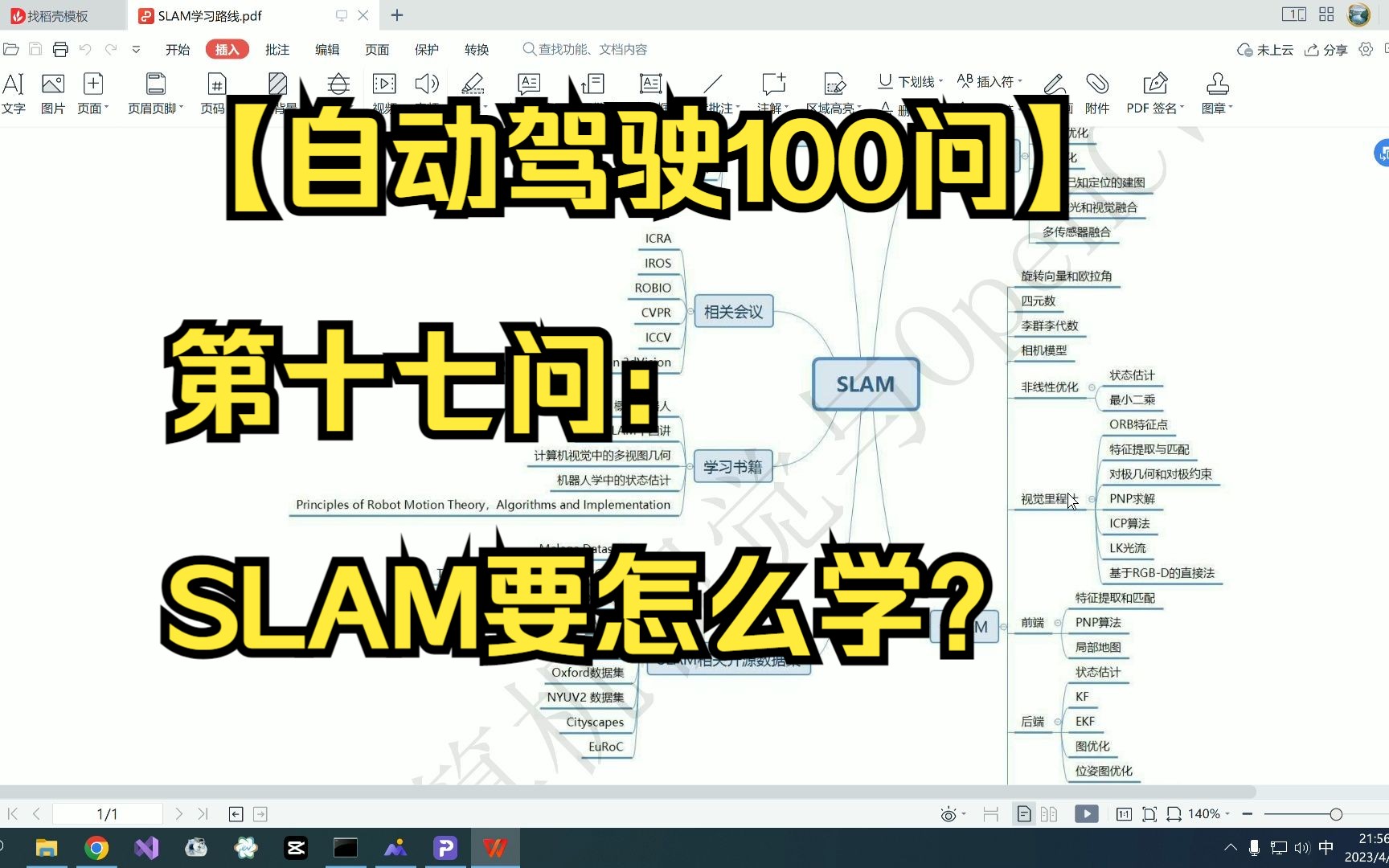
【自动驾驶100问】第十七问:SLAM学习路线分享
发布人
UP是《学习OpenCV4:基于Python的算法实战》和《深度学习计算机视觉实战》两本图书的作者,目前从事自动驾驶感知融合与SLAM建图算法开发,分享内容包括深度学习、计算机视觉、OpenCV、自动驾驶、SLAM、C++/Python语言开发等方向的内容。 欢迎关注公众号“计算机视觉与OpenCV”(分享内容会发在这里) 欢迎添加我的微信号study428讨论交流。
打开封面
下载高清视频
观看高清视频
视频下载器
具备 L4 级公开道路运行能力的国产无人驾驶出租车,可容纳五人
今天M9智驾自己进服务区,还真见证了一次“AI成精”。也不知道哪个神经元啥时候学会了啥
【C++面试100问】第七十四问:STL中既然有了vector为什么还需要array
【C++面试100问】第一问:include双引号与尖括号的区别是什么?
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
广汽冯兴亚谈传统车企出卖灵魂论:自动驾驶技术现在已不是灵魂
【C++面试100问】第七十七问:委托构造函数是什么?
【C++面试100问】第五问:C++中的智能指针使用有哪些坑?
不是电池倒置技术吗?南京撞车起火大肆吹的电池倒置技术又不产生作用了?
【C++面试100问】第六十七问:C/C++中字符串与数字如何互转?
【C++面试100问】第八十问:拷贝构造函数的第一个参数为什么要是引用类型?
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
【C++面试100问】第三十七问:程序编译的可执行文件内存分区是什么样的?程序运行时又是如何分区的?
【C++面试100问】第三十二问:map可以使用struct对象作为key吗
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
【C++面试100问】第一百问:程序异常崩溃,段错误的原因是什么?如何调试?
“自己充电的特斯拉” Robotaxi最新无线充电演示
【C++面试100问】第六问:内存泄漏是什么,有哪几种,怎么解决?
【C++面试100问】第九十七问:map和set区别是什么,底层实现是什么
养殖技术哪家强?搭载华为乾崑智能驾驶ADS3.0辅助驾驶 #智能驾驶 #华为汽车 #阿维塔华为乾崑高阶智驾#ADS伴我行#阿维塔11
【C++面试100问】第八十五问:有了const,C++11为什么还要引入constexpr
【C++面试100问】第九十三问:printf函数的实现原理是什么?
【自动驾驶100问】第二十问:自动驾驶中的感知系统
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
【自动驾驶100问】第十六问:PnP算法介绍
FSD V12.5.6端到端高速,聪明出乎意料!
【自动驾驶100问】第十二问:旋转矩阵和变换矩阵的区别是什么
【C++面试100问】第二十九问:请详细讲讲C和C++中的内存分配方式
马斯克陪伴特朗普观看星舰发射,摄影师不知道该把镜头给谁了
【C++面试100问】第八十三问:Windows与Linux编译器用什么?
【自动驾驶100问】第十五问:相机的内参与外参
OAK相机夜间挑战:纯视觉SLAM的极限测试
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
交警同志的经验包
自动驾驶时代即将来临⚡️
你敢信,自动驾驶最大的隐患不是路况,而是人为干预!
【C++面试100问】第九十二问:#pragma once与#ifndef的区别是什么
【自动驾驶100问】第十八问:多传感器融合
【C++面试100问】第十三问:右值引用与移动构造是什么?
拆解理想L9自动驾驶控制器。整车产品虽好,但是自动驾驶控制器可靠性不高!