V
主页
控制系统快速性的本质
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
1.2控制系统的分类原则
7.6离散系统的稳定判据
3.3线性控制系统的能控能观分解
7.1Z变换的定义及基本方法
1.2.1系统的状态空间描述—系统建模
2.1.3系统建模-运算放大器电路建模
1.1控制系统的基本概念
7.3离散系统的差分方程
1.3控制系统的原理图
3.6.1输入端误差与输出端误差的区分
1.1.1系统的状态空间描述—基本概念
3.1.2控制系统时域响应的性能指标
3.1.1控制系统的时域响应
1.4.3系统的状态空间描述—题型归纳(利用传递函数写状态空间表达式)
3.4.3各项因素对系统的影响总结
2.1.1系统建模-机械建模基础
5.2状态反馈与状态观测器—状态观测器
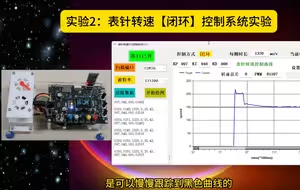
嵌入式入门(八)高中通用技术控制系统实验教学平台
【25控制考研】自动控制原理每日一题||10月31日带参数的离散系统稳定性讨论
1.5.3拉普拉斯变换求解微分方程
3.3.4改进系统响应的措施
3.3.2二阶系统的阶跃响应
2.3.4梅森公式基础
1.1.3系统的状态空间描述—题型归纳(由方框图确定状态空间表达式)
非最小相位系统bode图反推传递函数
3.4.1高阶系统的概念与处理方法
1.7电路系统基本知识
2.3系统状态空间表达式的解—题型归纳(状态转移矩阵)
1.4.1系统的状态空间描述—传递函数转换可控标准型
2.1系统状态空间表达式的解—状态方程的解
1.6机械系统基础知识
【25控制考研】自动控制原理每日一题||10月29日典型二阶系统参数求解及性能指标
1.5.1系统的状态空间描述—状态空间转换传递函数矩阵
7.5离散系统的脉冲传递函数
拉普拉斯变换的概念与性质(注6)
3.6.4动态误差系数法
3.3.3欠阻尼阶跃响应性能指标
1.4.2系统的状态空间描述—传递函数转换对角标准型
稳态误差的求解,以及何时不可以使用终值定理
控制考研自动控制原理每日一题—11.15