V
主页
京东 11.11 红包
线性系统、非线性系统、定常系统和时变系统判断方法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
自控公式串讲
如何判断是绘制0度还是180度根轨迹
1.1.1系统的状态空间描述—基本概念
3.1线性控制系统的能控性和能观性
1.4.1系统的状态空间描述—传递函数转换可控标准型
1.4.2系统的状态空间描述—传递函数转换对角标准型
谐振峰值与修正值
非最小相位奈氏图与伯德图绘制
奈氏图跳变问题
奈氏图调k判稳
5.2状态反馈与状态观测器—状态观测器
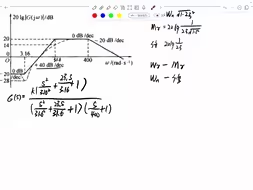
非最小相位系统bode图反推传递函数
控制系统快速性的本质
3.2线性控制系统的能控性和能观性-题型归纳(可控性和可观性的综合应用)
2.3系统状态空间表达式的解—题型归纳(状态转移矩阵)
一阶糸统时域分析单位是分钟还是秒(注11)
为何开环比闭环更稳定(注1)
现代控制理论公式串讲
离散系统的稳态误差—题型归纳
为何传递函数的分子不能比分母次数高(注8)
1.1.3系统的状态空间描述—题型归纳(由方框图确定状态空间表达式)
电路系统基本知识(注3)
5.1状态反馈与状态观测器—状态反馈
小偏差线性化(注5)
有关延迟环节的特性
1.6系统的状态空间描述—线形变换
离散系统的脉冲传递函数—题型归纳
4.1稳定性与李亚普诺夫方法
1.3.1系统的状态空间描述—微分方程转换状态空间
1.2.1系统的状态空间描述—系统建模
根据奈氏图(奈奎斯特图)反求开环传递函数
1.5.2系统的状态空间描述—题型归纳(由状态方程列写传递函数)
非线性特性分析习题
利用频域特性求输出
2.1系统状态空间表达式的解—状态方程的解
8.1由非线性环节推导描述函数—题型归纳
稳态误差的求解,以及何时不可以使用终值定理
参数根轨迹问题,k值不在分子上如何绘制根轨迹?
非线性环节自振参数计算
1.2.2系统的状态空间描述—题型归纳(机理建模)