V
主页
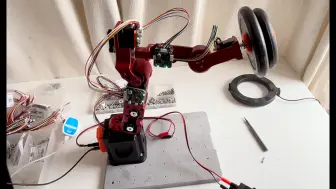
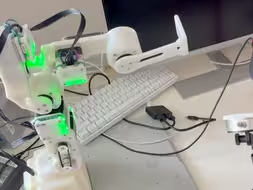
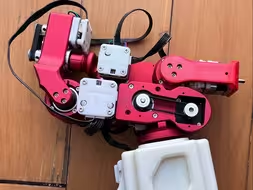
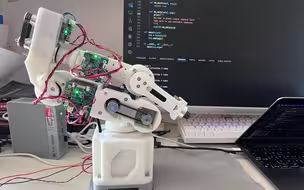
Dummy夹爪测试
发布人
原型夹爪测试,第一版先来个servo的吧,下一版做个力反馈的😄 通过控制板can bus控制
打开封面
下载高清视频
观看高清视频
视频下载器
稚晖君Dummy-木子晓汶优化版-全CNC金属大扭矩版-负荷测试-还是一如既往的稳😄
稚晖君dummy复制 J1 Dummy studio测试
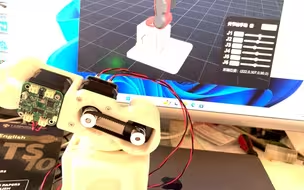
稚晖君Dummy微型力控夹爪来了!(夹个蛋蛋测试,结果蛋碎了一地啊😭)
稚晖君dummy之木子晓汶优化版 循环精度测试
稚晖君Dummy CNC金属版之木子晓汶优化完成了!😄
稚晖君Dummy步进电机升级,纯手搓无刷18NM大扭矩,高精度谐波减速机器人关节电机预告,关键还开源😄
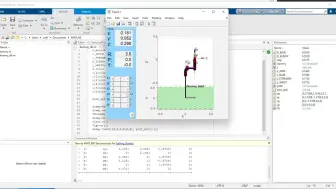
稚晖君dummy机械臂之算法1 - Matlab和机器人工具箱Robotic toolbox - 从零开始为dummy建模和仿真
稚晖君Dummy-木子晓汶优化版-全CNC金属大扭矩版装机
Dummy再进化之Rboot 太轻了!给我上老虎凳!!!😄
稚晖君机械臂dummy复制 谐波减速器组装测试
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
我用稚晖君的Electronbot成功做出了火焰喷射
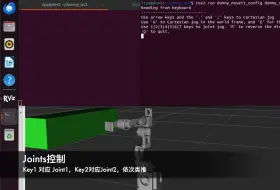
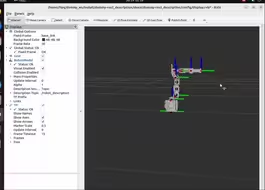
稚晖君dummy复制之 ROS, Rviz, Moveit 支持
稚晖君Dummy步进电机升级,纯手搓无刷谐波18NM大扭矩,高精度机器人关节电机循环精度测试
ROS2版DUMMY - Dummy画个圆如此简单😄 Python源码开放
Dummy整机验机帮助
机械手,机械臂,线驱机械手指,遥控机动战士高达
稚晖君dummy复制之【软件2】 更改42电机NodeID
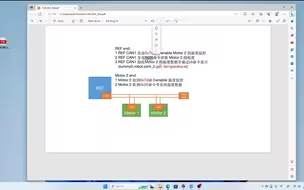
稚晖君dummy复制之【软件6】REF与Motor节点如何利用CAN BUS通信例程
稚晖君Dummy之木子晓汶优化版 用STM32cubeMX 自己开发Dummy固件&如何连接Dummy studio
稚晖君机械臂dummy复制 3000元全新谐波全机械状态验证测试(循环,简单路径规划, 负重和重复精度) 之一
ROS2版DUMMY - MTC实现Dummy物体抓取源码修改,测试完成,黑神话悟空, 我来了!哈哈
ROS2版DUMMY - 如何用键盘控制Dummy机械臂以及障碍物检测
万元内机械臂开动!!!
稚晖君dummy复制之【软件3】添加你自己的cli命令通过Fibre protocol
稚晖君dummy 重新设计的42电机驱动板
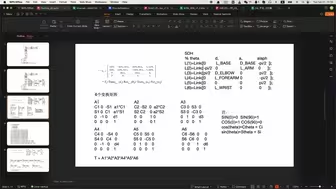
稚晖君dummy机械臂之算法2 - 利用Matlab/RBT和ChatGPT验证和实现Dummy FK正向运动学解析算法
稚晖君dummy复制 从零开始装配指南2
坚持开源!Dummy机械臂木子晓汶优化版 REF控制板,42和35电机闭环驱动板V1.0.1来了 😄
稚晖君dummy复制 REF控制板,42/35闭环驱动板,dummy 3d模型 全开源了!
六轴机械臂标准模型控制器---任意尺寸,任意形状的六轴都能控制
Elon Musk的Optimus机器人已经可以人模人样的遛弯了,不知道稚晖君大佬的进展如何了 😄
ROS2版DUMMY - Dummy ROS2支持的第一步 如何创建URDF文件
稚晖君dummy复制 之 正确打开互联网/物联网开发Dummy机械臂上位机(固件已开放下载)
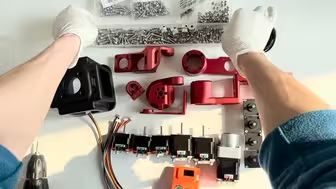
【dummy】稚晖君机械臂复刻07-机械臂准备(打印件及所需工具)
稚晖君dummy复制之【软件1】 打开即用的dummy固件编译/debug/下载虚拟机
基于力控的机械臂曲面自适应贴合移动
使用yolov8识别+深度相机+机械臂实现垃圾分拣机械臂
稚晖君Dummy之木子晓汶优化版 6分钟为Dummy写个图形界面上位机😄开源