V
主页
智能驾驶ADAS算法设计及Prescan仿真(1): 自适应巡航ACC控制策略设计与simulink仿真
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
车祸前0.1秒退出智驾?致敬0.1秒手速合集
特斯拉夺命10分钟,FSD连续想要送走我!
使用智能驾驶,短短的三分钟我差点撞两次。
20秒帮你省300万?
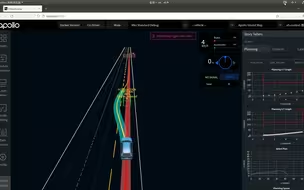
Apollo规划决策算法仿真调试(4):动态障碍物绕行
韩国科技创新,手推空中无人机,研究人员表示这是革命性的,将开启空中物流的新纪元,低空经济新赛道!
自动驾驶Apollo决策规划算法仿真7_借道绕行_apollo星火仿真大赛
carla与ros2的自动驾驶算法-planning与control算法开发与仿真
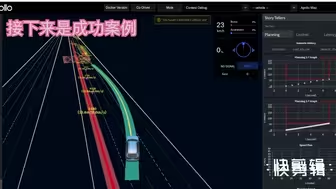
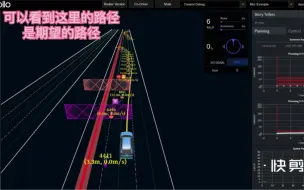
百度Apollo规划算法仿真:动态障碍物绕行成功与失败案例分析
你敢信,自动驾驶最大的隐患不是路况,而是人为干预!
三十秒做一个凳子
carla与ros2的自动驾驶算法-planning与control算法开发与仿真: AEB与车道居中LCC算法与仿真
百度Apollo规划算法Planning仿真:自主泊车成功演示
智能车的最后一舞!!!它必定是绝响!!!
别克E5自适应巡航体验,车道居中保持还是很不错的,视频末端有跟车自动识别展示。
Mobileye城市NOP:无保护右转路口礼让电动车
“眼睛上粘胶水、野猪陷阱!”,中国丛林机器狗明显吓到越南网民了!
百度Apollo自动驾驶仿真大赛--交通灯路口
自动驾驶决策规划算法Planning仿真:雨天夜晚城镇道路自动驾驶
小爱通话用我自己声音生成的语音太逆天了,跟伪人一样,很难绷得住
百度Apollo决策规划算法Planning仿真:施工区域绕行失败与成功案例对比分析
这位同学,人工智能算是被你玩明白了...老师快被气晕了!
波士顿动力吃饭家伙,连锅带碗被砸。云深处制造山猫机器狗。越野性能极强。#机器狗 #国产机器狗 #科技改变生活 #黑科技 #玩个很新的东西
自动驾驶决策规划算法Planning讲解与仿真_慢速车绕行_星火apollo仿真赛
百度Apollo规划算法Planning仿真:施工区域绕行的演示与分析
还在无脑吹波士顿动力?醒醒,来看看中国机器狗
Adobe彻底放狠料了。黑科技的adobe,让设计师的天都塌了
自动驾驶决策规划算法Planning解析与仿真4: Apollo自动驾驶汽车在101高速公路的表现
谁能想到自动驾驶最大的威胁居然是来自人为?
Apollo决策规划算法仿真:planning模块如何与lgsvl进行联合仿真,离线仿真python api脚本示范
道路千万条,安全第一条!看完全过程,你觉得问题出在哪儿?
Mobileye城市NOP:狭窄路段持续行驶
AI生成的真人版《名侦探柯南》,东宝你就照着抄作业吧
自动驾驶Apollo决策规划算法仿真6: 那些控制车辆失败的搞笑场景
【小米智驾】车位到车位,起步即享智能
盘点一周AI大事(11月17日)|Grok证明黎曼猜想?
原作者已经辟谣,只是个玩笑。如果马斯克的Grok-3证明了黎曼猜想?在数学界会比诺贝尔还轰动。百余年来无数天才都未能证明?。
华为问界自动泊车大范围故障,智驾停摆