V
主页
机器人路径规划|RRT算法|开源代码|GUI界面
发布人
好久不见,甚是想念屏幕前的各位大佬,这期视频的代码上手有点难度,不太容易阅读,但是又一定参考和应用价值,后期会给大家更新可供阅读(注释代码含义)和编辑的代码,我相信对你的研究方向一定有指导性的意义,制作不宜,白嫖不合适,点个赞吧,需要代码的评论区回复暗号:好久不见。 路径规划预告视频点赞破200就努力给大佬们整起来。
打开封面
下载高清视频
观看高清视频
视频下载器
多机器人协同路径规划算法
手把手教rrt算法(14)-代码优化
【论文代码复现42】从0开始复现【路径规划带经纬度】遗传算法求解
手把手教rrtstar算法(1)-代码演示以及获取方式
使用自定义RRT*全局规划器建图导航
rrt算法三维避障路径规划的MATLAB实现
基于OMPL的运动规划介绍与教程|ROS|开源代码
动态RRT*+DWA(融合APF)机器人导航算法实现
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
基于MATLAB的移动机器人运动规划与避障RRT算法
(全网最详细时长40分钟)遗传算法优化路径规划算法二维栅格地图的详细讲解
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
【Python】路径规划——RRT
机器人路径规划(DFS、A*、PRM、RRT、RRT*等)
物流多机器人系统任务分配调度与路径规划相关算法展示
路径规划与轨迹跟踪系列算法学习_第1讲_Dijkstra算法
机器人路径规划、轨迹优化课程-第六讲-RRT*算法原理和代码讲解
路径规划matlab全集
【Python】路径规划——机器人避障算法
RRT*算法{基于改进的RRT*算法在空间中生成无碰撞的路径}
机器人路径规划、轨迹优化课程-第四讲-A*算法原理和代码讲解
规控学习小组分享:自动驾驶常见规控算法分享-路径规划
【Python】路径规划——机器人避障
机械臂研究入门必看流程!URDF导入|仿真平台|运动规划|运动学
ROS中自定义全局规划器(上)_算法部署
机器人路径规划、轨迹优化课程-第五讲-RRT算法原理和代码讲解
混合A*路径规划器,膜拜,分享论文及代码纯Python
路径规划算法 改进A*和改进动态窗口融合算法 Astar 动态窗口法 Matlab
蚁群算法进行路径规划
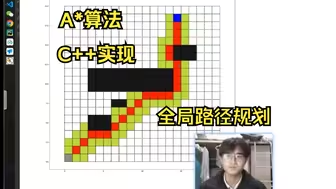
A星算法C++实现及详解,自动驾驶全局路径规划astar算法
【C++】2-手撕A*路径规划算法
39基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet
基于粒子群算法的ROS全局路径规划器(开源)
【Matlab】路径规划——机器人避障
【路径规划】基于matlab实现的A星⭐算法 2
【路径规划Gazebo仿真】自适应DWA与传统DWA路径规划效果对比
【C/C++编程技术】A星寻路算法详解!思路分析 + 代码演示,从零开始带你理解最简单的路径规划算法!
路径规划算法 A*和人工势场融合 动态路径规划
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划