V
主页
京东 11.11 红包
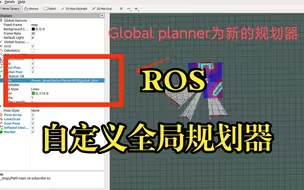
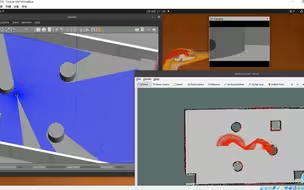
ROS中自定义全局规划器(上)_算法部署
发布人
将自己写的路径规划算法应用在ROS仿真环境或真车当中--C++
打开封面
下载高清视频
观看高清视频
视频下载器
ROS路径规划与仿真导航
5分钟,看懂ROS的Navigation导航系统
【超详细】遗传算法(下)_matlab代码实现
a星算法(ROS仿真)
基于ROS的机器人自主建图+路径规划演示实验
move_base,年轻人的第一次导航
ROS导航系统 | 局部规划器 | Local Planner
机器人操作系统 ROS 快速入门教程
二、ROS小车视频教程
改进A星算法(一)基础代码详解
改进A星算法(六)双向搜索【直播带改】
ROS导航系统 | 全局规划器
A*的ROS实现
改进A星算法(二)启发函数
【超详细】遗传算法(上)_求解01背包问题理论
ROS中自定义全局规划器(下)_代码说明
ROS导航系统 | DWA规划器 | DWA Planner
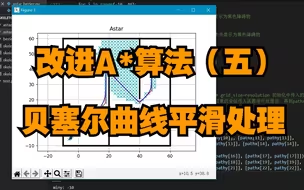
改进A星算法(五)贝塞尔曲线平滑
ROS导航系统 | AMCL 定位算法
基于ROS开发的多机器人编队导航系统
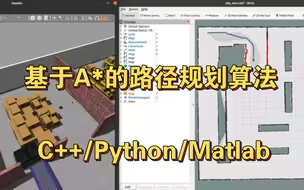
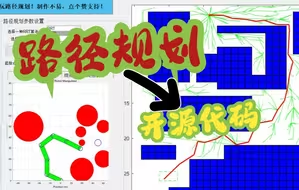
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
15_ROS动作通信3:机器人多目标点巡航
自制局部规划器 | 地图 raicom
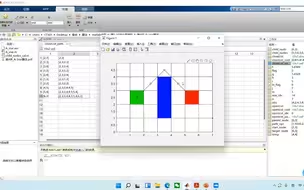
A星寻路算法详解(下)_matlab代码实现(超详细!)
毕业设计:基于ROS的移动机器人闭环抓取研究与实现
基于ROS的轮式机器人路径规划效果演示
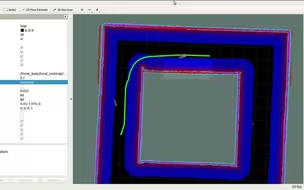
Ros实现全覆盖路径,毕设实现小一半咯
16_ROS动作通信3:导航简单调参效果
局部路径规划插件实现
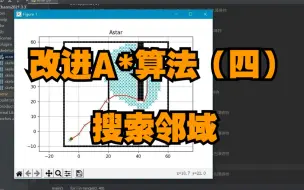
改进A星算法(四)搜索邻域
ROS路径规划Gazebo仿真Rviz导航机器人实现
在我家户型图上跑个RRT*全局规划器!
机器人路径规划|RRT算法|开源代码|GUI界面
肝了4天的夜,写完 DWA局部路径规划算法。
A星寻路算法详解(上)_matlab基础(超详细!)
自制局部规划器 | 没事跑两圈~
【超详细】蚁群算法(上)_理论概述
超精简8分钟ros入门教程,实战前够用的基础知识。茴字有四种写法,但你只要会一种
改进A星算法(三)权重系数
全中国搞路径规划的研究生都进来看!不仅对路径规划,我们也要对心规划!