V
主页
京东 11.11 红包
【Running Robot 任务分析与解决方案】程序主框架和关卡识别
发布人
本系列视频基于2021年标准赛与虚拟赛的任务,对本组解决方案进行讲解和梳理,意在抛砖引玉,助力大家在今后的比赛中取得好成绩。 PS:大赛官网:http://www.running-robot.net
打开封面
下载高清视频
观看高清视频
视频下载器
【Webots入门教程-3打造第一个机器人】使用Webots做一个两轮驱动机器人
【Webots入门教程-4运行第一个仿真】循迹,避障,闪烁LED-机器人控制器实现
【Webots入门教程-1用户界面(UI)】Webots用户界面介绍和基本使用
一定要看完,一个视频搞懂正反向运动学,不香嘛?!【六足机器人全拆解P2】
一个视频理解六足控制和python模拟器【六足机器人全拆解P3】
【Webots入门教程-5操控世界】编写supervisor控制器灵活修改场景树
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
人形机器人——以产业发展视角探究
【Webots入门教程-0先导课】Webots简介和课程计划
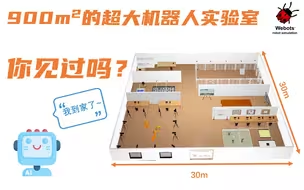
900平米的实验室有多大?【Webots构建机器人实验室】
【硬核】【开源】国庆假期我制作了迪士尼双足机器人
老年照护的未来?——人居环境机器人“5号”(The Five,小五)
中国仿生机器人公司 EX机器人(EX Robot)
焦继超:“人工智能+”物流行业应用-人形机器人
体验Isaac sim4.2中的人形机器人示例
人形机器人量产临近,深度梳理5家核心公司
相机模型都没弄懂,怎么搞机器人视觉算法?
我的科研工作介绍
【S3】中文字幕|人形机器人:通向永生之路 - Chasing Immortality with Humanoid Robotics|Eric Jang
博特勒机器人通过手眼协调接收归还身份证的操作演示
Why 六足?你能获得什么?【六足机器人全拆解P1】
强化学习框架-Legged Gym 训练代码详解
上海工博会进入倒计时,明天最后一天啦!今天和明天还可以来现场打卡哦~
【一碗机智的糖浆】我的最新作品,快来一睹为快!
外媒全面介绍上海傅立叶智能 最新Fourier GR2机器人,较第一代更高,更强,更智能;手部带触觉,具有模块化和开源开发平台,解决中国未来老龄化问题而设计?
人工智能的出路在哪?或许【生物启发】可以给出答案?!
为啥人形机器人不能站直了走路?从科学角度来讲讲!
【Python】人形机器人——全身控制
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
在人形机器人仿真训练领域,博特勒对传统仿真(Sim2Real)方法的创新优化
阿米园智能人形机器人
为什么需要多传感器融合
[小猿口算]3分钟加入小猿口算脚本竞赛(基于视觉识别与tesseract OCR)
只要2万美元!马斯克确认特斯拉机器人2.0 Optimus Gen 3可以完成的所有任务!
机器和机器人有什么区别?机器人学到底在研究什么?
当地时间10.10日,TSLA的We Robot发布会上人形机器人跳舞
进来看看你和果蝇的视觉定位谁强?【Nature论文解析】
电新团队:电新全行业研究框架培训(字幕纯享版)
液态金属机器人——黛西公主 #二次元 #黛西公主 #液态机器人
“天工”机器人长程室外奔跑