V
主页
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
发布人
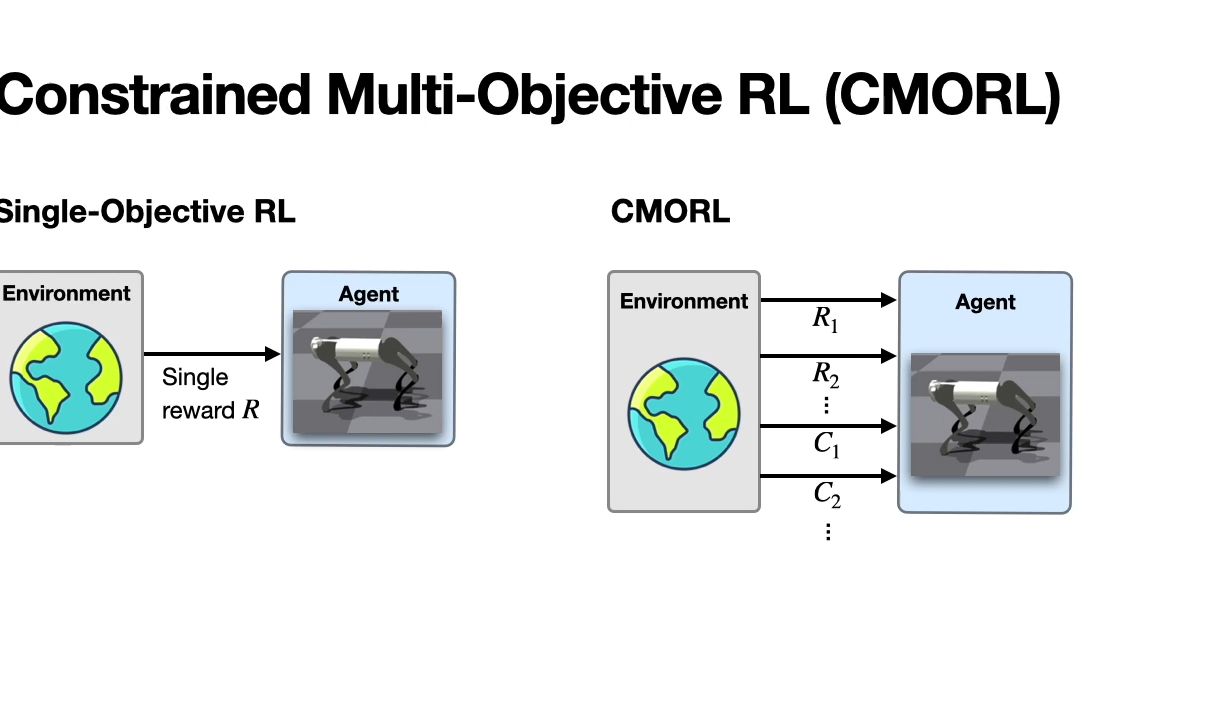
https://www.youtube.com/watch?v=uruOBd2cKQs Stage-Wise Reward Shaping for Acrobatic Robots: A Constrained Multi-Objective Reinforcement Learning Approach Dohyeong Kim, Hyeokjin Kwon, Junseok Kim, Gunmin Lee, Songhwai Oh As the complexity of tasks addressed through reinforcement learning (RL) increases, the definition of reward functions also has become highly complicated. We introduce an RL method aimed at simplifying the reward-shaping process through intuitive strategies. Initially, instead of a single reward function composed of various terms, we define multiple reward and cost functions within a constrained multi-objective RL (CMORL) framework. For tasks involving sequential complex movements, we segment the task into distinct stages and define multiple rewards and costs for each stage. Finally, we introduce a practical CMORL algorithm that maximizes objectives based on these rewards while satisfying constraints defined by the costs. The proposed method has been successfully demonstrated across a variety of acrobatic tasks in both simulation and real-world environments. Additionally, it has been shown to successfully perform tasks compared to existing RL and constrained RL algorithms. Our code is available at this https URL. https://arxiv.org/abs/2409.15755 https://github.com/rllab-snu/Stage-Wise-CMORL
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
人形机器人腿部结构 基于 4DoF 球面并联机构
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
人形机器人 手指机械结构
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
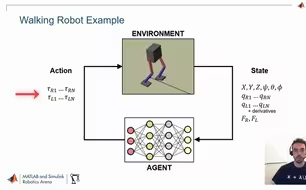
双足机器人的深度强化学习- MATLAB and Simulink
MPC and RL, two different roads to legged locomotion, and that's OK
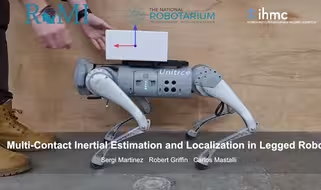
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
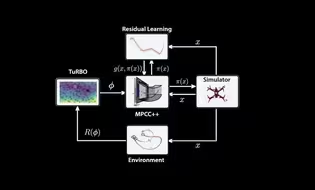
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
Agile Continuous Jumping in Discontinuous Terrains
[CL]ESP32四足机器人操作演示-适配立创开源平台对应项目
基于分层优化的四足机器人全身运动控制搬运重物
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
一机多用“三合一”足端设计机器人
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
华为下场,盘点国产人形机器人4家核心公司
Semantic Traversability Estimation Using Pose Projected Feature
强推!这绝对是B站最全的(python+机器学习+深度学习)系列教程,草履虫都能学会,学不会你来锤爆我!人工智能/机器学习/深度学习/python/神经网络
人形机器人灵巧手臂最新成果
手写DiffusionPolicy【1】:最简单的机器人操作
如何用rl_sar采集训练执行器网络的数据
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
【毕业设计开源】机器人全栈开发,四足机器人系统设计【优秀毕设】
波士顿动力 Spot 足臂协同操作
舵机3D打印人形机械手
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
幽灵机器人 Ghost Robotics - Vision 60
Pedipulate_ Enabling Manipulation Skills using a Quadruped Robot's Leg
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
基于模型控制的人形机器人行走 MATLAB and Simulink
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
2024 IROS QRC(四足机器人挑战赛)浙大机器人队自主导航运动