V
主页
京东 11.11 红包
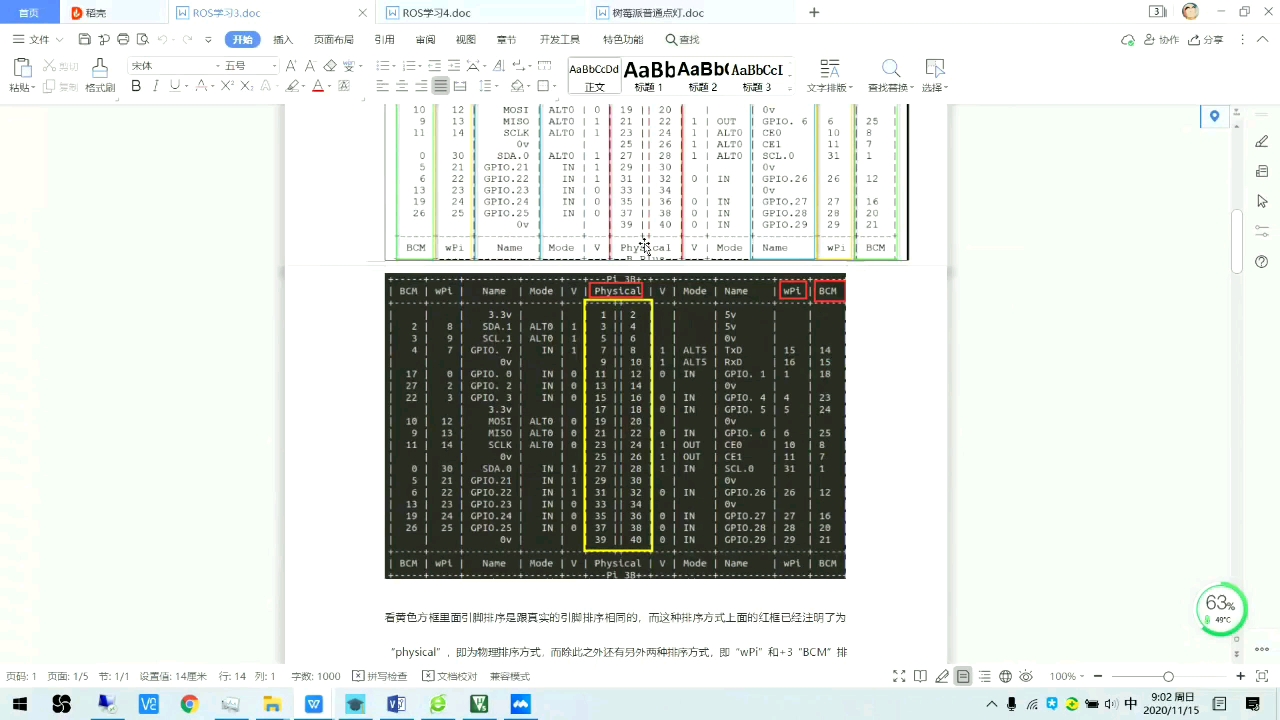
树莓派ROS通过wirⅰngpi 控制外部引脚(ROS)(若朋机器人)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
ROS怎样扩展到树莓派外部引脚(ROS系列)(若朋机器人)
嬉跳的小松鼠朋朋(若朋机器人)
基于ROS和Gazebo使用目标检测的机械臂控制的统一仿真的实现(英文机器人论文)(若朋机器人)
Rvⅰz源程序讲解(ROS)(若朋机器人)
12.1-12.9 Gazebo的基本情况 (ROS by example)(若朋机器人)
9.4 用真实的伺服电机做头部追踪(ROS by example Ⅱ)(若朋机器人)
使用摄像头和摄像头IMU的视觉惯性状态估计(英文机器人论文)(若朋机器人)
视觉系统图像的空域操作(10分钟版)(若朋机器人)
基于安卓系统智能小车运动控制App研制(作品分享)(若朋机器人)
管外巡检机器人设计(作品分享)(若朋机器人)
泛谈电类自动化专业的课程(大学那点儿事儿)(若朋机器人)
7.7 使用测量确定到达目标 7.8 使用测量前进与返回 7.9 使用测量走四方形 7.10 遥控机器人(ROS by exαmple)(若朋机器人)
欧姆定律/法拉第定律/基尔霍夫定律(电工电子技术)(若朋机器人)
移动机器人的坐标系完整版(ROS实用技术)(若朋机器人)
(若朋机器人)用于远程临场感机器人的使用Xenomai信息通道机制的ROS和RT任务的集成(之二)(英文机器人论文讲解)
(若朋机器人)基于RGB-D摄像机在复杂情况下的鲁棒机器人位姿估计(英文机器人论文讲解)
用MoveⅠt控制机械臂(若朋机器人)
管内巡检机器人设计(作品分享)(若朋机器人)
4.5-4.12 用URDF搭建图像传感器丶激光雷达丶机械臂丶躯干(ROS by example Ⅱ )(若朋机器人)
5.1-5.4 安装配置调试Arboti X(ROS by example Ⅱ)(若朋机器人)
自动搬运车设计(设计讲座)(若朋机器人)
51单片机外部端子与外部中断的设置(零基础制作51单片机控制的循迹电动小车)(5分钟版)(若朋机器人)
12.10 使用simple_grαsppⅰng 进行真实的取和放 12.11 运行gazebo Headless + Rⅴⅰz 若朋机器人
基于鲁棒规划识别和轨迹预测的高效人机协作(英文机器人论文)(若朋机器人)
10.8 OpenCⅤ: 计算机的视觉库(ROS by exαmple) (若朋机器人)
(若朋机器人)基于ROS的机械臂自动抓取物体
6.6 OpenCV 的常用函数(移动机器人控制系统设计与实现)(若朋机器人)
从速度要求到电机机械特性再到变频器机械特性(10分钟版)(若朋机器人)
1.1 电动机的基本结构(电机拖动与控制精讲)(若朋机器人)
双臂空间机器人非协作空间目标的虚拟立体视觉位姿测量之二(英文机器人论文)(若朋机器人)
RGB-D 相机二三维信息一体化定位解算模型(论文讲解)(若朋机器人)
居室服务机器人云视觉同步定位与建图之二(英文机器人论文)(若朋机器人)
(若朋)非完整移动机器人的视觉伺服(英文论文讲解)
11.1 摄像机坐标系注意事项 11.2 物体跟踪器 11.3 物体跟随器(ROS by eⅹample)(若朋机器人)
树莓派单片机开发板怎样传数据到云服务器(云服务器应用技术)(若朋机器人)
机器人路径规划在人工智能课程中怎么样(移动机器人技术)若朋机器人
优化框架下快速探索随机树多机器人地图探索之三(英文机器人论文)(若朋机器人)
通过上下文编码修复信息缺失(论文讲解仅供学习)(若朋机器人)
一种速度方向控制的基于图像的视觉伺服方法之一(英文机器人论文)(若朋机器人)
电梯的应用情况(电梯控制技术)(若朋机器人)