V
主页
京东 11.11 红包
A.4.4.3.5.Project Point(将点按某个方向投影至物体上,得到①投影点②被投影物体序号)-20240718(0086.1)
发布人
A.4.4.3.5.Project Point(将点按某个方向投影至物体上,得到①投影点②被投影物体序号)-20240718(0086.1)
打开封面
下载高清视频
观看高清视频
视频下载器
A.3.3.1.1.Create Set(从简单数字型数据中提取其中包含的①一个不重复数据集合②映射结构)-20231215(0089)
A.4.4.3.5.ProjectPoint(将点根据向量方向投射至物体得①【唯一、最近】在物体上的点②多个物体时,输出投射到物体的序号)-20230128
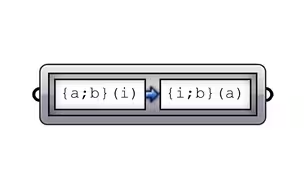
A.3.5.3.3.PathMapper(路径修改器)-20231215(0091)
Excel快速输入带圈或带括号的序号
A.11.8.7.Load(荷载)-20240718(0104)
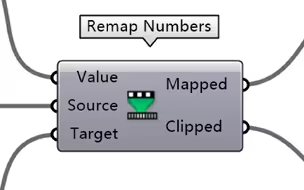
A.2.1.2.1.Remap Numbers(重映射某数字到一个数字区间得到新数字)-20220625(0040)
A.3.3.3.2.Find Similar Member(根据给定的值,在一组集合中找出最相似的值和对应序号)-20240108(0090)
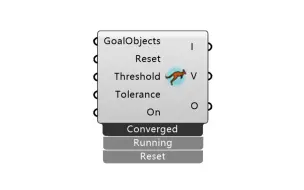
A.11.9.5.Solver(解算器)-20240308(0098)
A.6.2.4.2.Patch(嵌面)-20240723(0108)
A.5.5.2.7.Project(将曲线根据向量方向投射至Brep上得到'投影曲线')-20230128(0085)
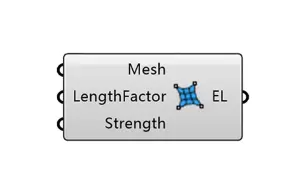
A.11.6.4.EdgeLengths(类似弹性体)(对Mesh内各边的长度 按比例缩小或扩大 至对应长度)-20240720(0105)
A.4.5.3.7.SortAlongCurve(按曲线的方向排列点)-20240723(107)
REVIT中能直接进行结构自动计算啦!
A.11.9.3.Show(将物件显示)-20240720(0106)
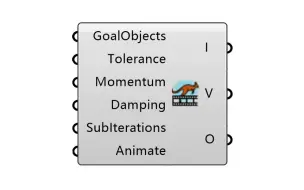
A.11.9.1.BouncySolver(弹力 解算器)-20240226(0097)
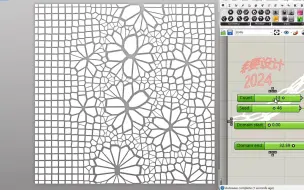
干扰渐变泰森多边形
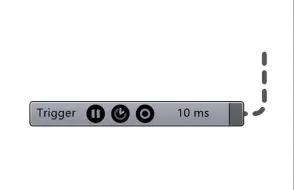
A.1.4.2.5.Trigger(①手动②隔一段时间 触发更新)-20240218(0093)
Comsol with Matlab 12--- 函数转化几何
A.11.9.6.StepSolver(分步 解算器)-20240207(0092)
A.11.9.2.Grab(用鼠标拖拽点)-20240226(0100)
【逆戟鲸】从零开始制作充气鲸鱼服 EP06_安装呼吸阀,超详细保姆级教程,持续更新中,人工精翻熟肉
A.2.8.3.4.Smooth Numbers(在某个时间内延迟数值的变化)-20240226(0095)
手搓光刻机,实现接近1微米的精度
A.6.1.4.2.SurfaceClosestPoint(①点所在曲面的UV参数②点到曲面最近的点③点到曲线的距离)-20220930(0073)
A.3.5.1.5.SimplifyTree(简化树)(0015)-20220228
A.0.2.1.Zoom(将GH空间的物体在屏幕中放至最大)-20220914(0063)
A.11.5.6.6.Length(Line)(对直线 按 ①原长度②指定长度值 进行类弹簧约束)-20240226(0099)
A.2.5.1.2.Expression(表达式).1.数学处理.1.CInt(x)(四合五入最近整数)-20240326(0101.01)
A.1.3.2.4.Button(按钮(具有两个值的按钮对象)( True OR False)(0 OR 1))-20240227(0096)
A.9.3.2.Move(物体根据向量移动得到新物体)-20220911(0051)
用rhino+gh工作流实现参数动画渲染
A3.5.1.2.Clean Tree(清理数据)-20220222(0012)
我的世界投影文件分享(建筑/机器展示)
鬼灯的Grasshopper相关讲解-20210221起:α.1.1.记录的都是设计工作的热情-20220208(0010)
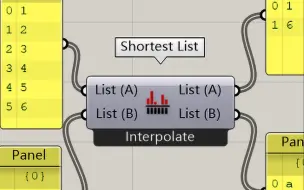
A.3.1.4.3.Shortest List(以最短数据为长度标准,按三种其中一种方式①去头②去尾③去中间,收缩数据至对应长度)-20221012(0075)
C.010.保留Brep(多重曲面)范围内的物体-20221013(0079)
A.11.8.1.Anchor(将点用锚点的力固定住)-20240331(0102)
B.A.本质.1.比例.2.关于柯布西耶的模度-20211027(0005)
A.3.3.2.4.Member Index(在集合中寻找某元对应序号及计算此元的数量)-20220627(0043)
Grasshopper中的行人视线模拟与街道空间安全性分析