V
主页
【VALSE论文速览-10期】GraspNet-1Billion:机器人通用物体抓取的新方法论
发布人
论文题目:GraspNet-1Billion:机器人通用物体抓取的新方法论 作者列表:方浩树,王晨曦,苟铭浩,卢策吾(上海交通大学) 论文链接:[https://openaccess.thecvf.com/content_CVPR_2020/papers/Fang_GraspNet-1Billion_A_Large-Scale_Benchmark_for_General_Object_Grasping_CVPR_2020_paper.pdf]
打开封面
下载高清视频
观看高清视频
视频下载器
论文有救了!【AI+医疗】刷爆B站最好的医学影像识别技术教程!从理论到科研!临床研究、影像组成、SCI论文解读、Python机器学习、数据处理
Llama 3.1论文精读 · 1. 导言【论文精读·54】
【VALSE论文速览-102期】基于对偶对抗自适应的跨设备真实图像超分辨率
20240117【学术新人“修炼手册”】彭思达:完成一篇论文的科研历程与经验
Transformer真的不难!100集带你逐层分解Transformer模型——注意力机制、前馈神经网络、位置编码、编码器、解码器等!算法原理+实战,通俗易懂
【VALSE2024】0506《Workshop :具身智能的视觉与学习》
研究生自学必看!耗时8个月时间整理的公式代码一条龙【MATLAB论文复现】教程,带你轻松复刻MATLAB论文从公式到代码完整流程!
【VALSE论文速览-08期】基于单张图像的三维场景重建
【VALSE2024】0507《Workshop :多模态大模型》
20240424【空天智能感知】程塨:光学图像小目标检测
研一如何快速入门三维重建?华东理工博士带你通俗易懂的讲解三维重建的原理与算法,3小时就能学会!赶紧收藏
20240417【视频生成与理解】罗平:Efficient Diffusion Transformer for Image and Video Generat…
强推!2024医学生必看的【人工智能+医疗】全套教程,教程从零开始,导师不教你的知识本课程统统告诉你,讲的非常全面!-人工智能/医学/计算机技术/计算机视觉
【VALSE2024】0505 高林《APR:三维高斯泼溅(3D Gaussian Splatting)》
【VALSE2024】0505 李鸿升《特邀报告:图像生成和视频生成若干前沿技术探索》
【VALSE论文速览-12期】Point2Skeleton:从点云学习骨架表达
短短2分钟内就能使用YOLOv10进行目标跟踪,只需要5行代码,你就可以在自己的项目里使用!小白也能轻松上手实验-人工智能、计算机视觉、目标检测。cv
沐神在交大讲座全过程
视频行为分析系统v3.42,CNN+LSTM分析时序视频帧,视频分类算法
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别,这绝对是B站最适合入门学习的OpenCV计算机视觉课程!从入门到图像处理实战!人工智能丨深度学习丨
20231011【医疗基础模型 (上)】朱闻韬:病理图像大模型研究与应用
20210407【如何做出高水平的科研工作?--来自顶会AC/PC的观点】Panel
【VALSE2024】0505《2023-2024年度CV与ML领域重要学术进展》
20231011【医疗基础模型 (上)】郭翌:智能超声大模型研究及其临床应用
【VALSE2024】0505 杨易《特邀报告:混合模型驱动的内容生成与具身智能》
20220803【妙笔生花,画龙点睛: 视觉生成式模型专题研讨】李崇轩:扩散概率模型与其加速推断算法
【VALSE论文速览-19期】基于Transformer的视觉目标跟踪
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
20211201【薪火相传经验谈——学长学姐教你如何做科研】袁粒:读博不易,且读且珍惜
【火爆全网】2024最全最新麻省理工学院-深度学习导论 6.S191 深度学习入门
【教材+源码】深度学习必看圣经!李沐大神《动手学习深度学习》最新版视频教程分享,比追剧还爽!(深度学习/神经网络/计算机视觉)
【VALSE论文速览-31期】面向弱监督实例级别商品检索的多模态预训练
20221221【遥感图像智能理解与应用】孙显:大规模遥感图像多任务学习方法探索与应用
【VALSE论文速览-98期】基于多面注意力机制的人群计数
【VALSE2024】0506《Tutorial:开放词汇视觉感知论坛》
20230426【通用大模型时代的计算机视觉研究】Panel
20231025【面向视觉的零样本学习】李晶晶:基于生成模型的零样本视觉识别
20230913【图神经网络理论与算法】魏哲巍:图卷积神经网络:理论与计算
【VALSE论文速览-27期】3D点云语义分割当中的“稀疏到稠密”多模态联合学习
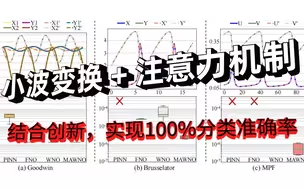
结合创新,小波变换+注意力机制,实现100%分类准确率