V
主页
京东 11.11 红包
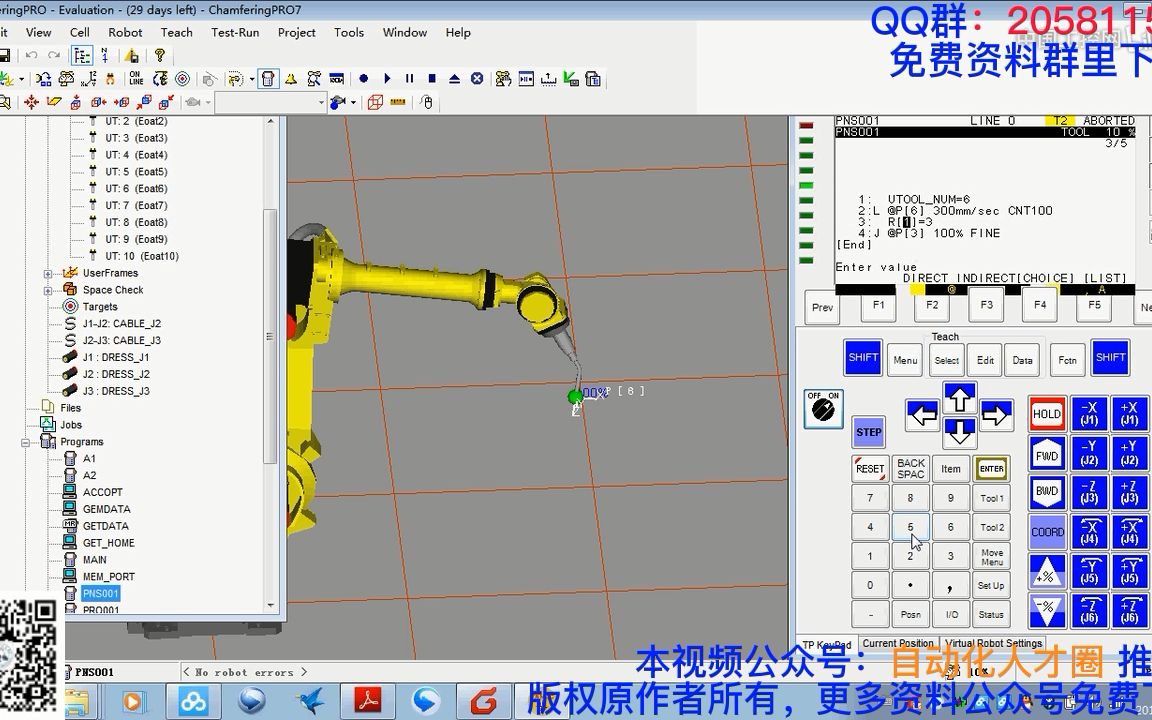
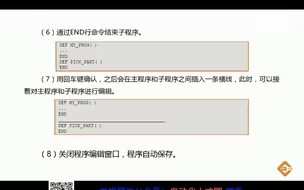
35 发那科机器人修改机器人程序
发布人
发那科机器人编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
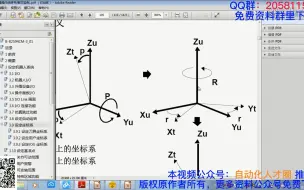
07 发那科机器人通用io的分配
56 发那科机器人修改机器人关节运动范围
46 发那科机器人在程序中使用查找指令
55 发那科机器人修改机器人系统变量的数值
34 发那科机器人创建机器人程序
29 发那科机器人数字量io的使用
50 发那科机器人在程序中使用跳转语句JMP-LBL
08 发那科机器人PR寄存器讲解
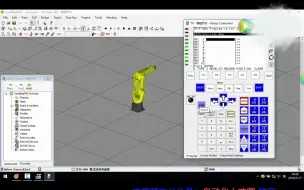
77 发那科机器人用运动控制制面板
37 发那科机器人在程序中使用io链接plc
31 发那科机器人寄存器的使用
39 发那科机器人在程序中使用脉冲输出指令
66 机器人仿真软3D操作方法
59 发那科机器人的基本设置
63 发那科机器人操作面板设置为中文界面
26 发那科机器人的位置数据#工业机器人
15发那科机器人用户坐标系的使用和三点法标定
45 发那科机器人在程序中重新编码编号
14 发那科机器人工具坐标系的手动切换和自动切换
七种机构原理
12 发那科机器人6点法标定工具坐标系
16 发那科机器人用户坐标系的使用 四点法标定a
05 发那科机器人创建一个搬运项目a
04 发那科机器人创建一个程序并示教轨迹a
65 发那科机器人示教器简易画面切换
23 发那科机器人程序结构讲解
第20讲 KUKA机器人调用当前位置变量
18 发那科机器人用户坐标系的使用 切换用户坐标系
11_1KUKA机器人局部子程序和全局子程序的使用
71 发那科机器人用标签在对象上加注释
40 发那科机器人在程序中调用子程序
10 发那科机器人6个坐标系介绍
36 发那科机器人在程序中使用io控制机器工具
智能焊接
09 发那科机器人PR寄存器软件操作示范
05 发那科机器人创建一个执行程序
04 让发那科机器人动起来
72 发那科机器人用工人操作面板操作人物
10 发那科机器人 爱的呈现-运动指令
S7-1200运动控制功能(3)-编写程序