V
主页
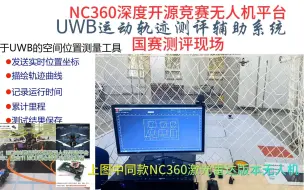
宇树科技4D激光雷达定位下的航点遍历测试——2023年TI电赛G题空地协同智能消防系统基础部分实现
发布人
宇树科技4D激光雷达定位下的航点遍历测试——2023年TI电赛G题空地协同智能消防系统基础部分实现
打开封面
下载高清视频
观看高清视频
视频下载器
2023年电赛G题桂电国一硬件方案介绍—四天三夜VLOG-电赛G题-空地协同智能消防系统(原标题为23年电赛国奖机机与车车)
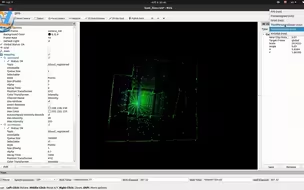
宇树科技4D激光雷达在无人机刷锅飞行状态下FAST-LIO建图测试(2023年6月24日)
无名小哥亲测低成本小车定位方案_空地协同智能消防系统——升级AHRS解算+里程计系统(无需机载计算机、激光雷达、深度相机、UWB定位)
高性价比宇树科技4D激光雷达在无人机平台上的应用初步飞行验证实测视频(2023年9月30日)
7_NC360竞赛无人机通过飞控串口指令控制激光雷达SLAM建图复位操作教程
四天三夜VLOG-电赛G题-空地协同智能消防系统(原标题为2023电赛记录,充实且快乐)
宇树科技4D激光雷达地下车库无人机FAST-LIO建图测试(2023年6月24日)
激光雷达点云数据和面阵激光测距传感器的数据解析与使用方法
在地下车库环境下无人机大范围运动时的定位测试——搭载宇树科技4D激光雷达定位
TI电赛B题送货无人机通过按键、菜单对坐标、模板进行设置
空地协同智能消防系统G题—TI 杯2023年全国大学生电子设计竞赛赛题解析会专家报告——胡仁杰,东南大学
(搭载由镭神智能与轮趣科技联合推出的N10激光雷达)电赛G题植保无人机完整开源方案—运用机载计算机搭载的CSI摄像头结合OPENCV机器视觉高效处理
无名创新TI电赛开源飞控SDK开发者模式—2020年电赛D题绕障飞行器—赛题元素自主绕杆解决方案demo分享
空地协同智能消防系统发挥部分实现案例——2023年TI大学生电子设计竞赛G题全国一等奖标准学习训练开源方案
任意位置、角度自主飞行穿越圆框——2022年TI电赛飞行器B题送货无人机
11、地面站航点遍历控制模式
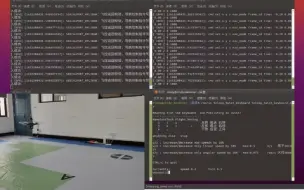
10_NC360竞赛无人机通过机载计算机键盘cmd_vel控制无人机飞行操作教程
无人机立硬币测试——盘古TI MCU系统板多功能控制器NController开源飞控方案TIUAV
1、按键控制功能与模式操作讲解——无名创新TI电赛飞行器无遥控器按键控制方案
四天三夜VLOG-电赛G题-空地协同智能消防系统(来源于视频号cchh0603)
NController多功能控制器软件解析第二讲——赛道特征识别(电赛C题-小车跟随行驶系统)
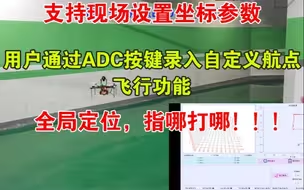
12_用户通过ADC按键录入自定义航点飞行功能——支持现场设置坐标参数,全局定位,指哪打哪
简易机械手的接线与行程设置——无人机加装夹取投放装置
NC360+RK3588+宇树L1激光雷达版本悬停测试(2023年7月)
4、NC-HD12灰度传感器模块的调试方法
电赛神器——V3版本ADC安全绳按键介绍与航点参数的录入教程(无遥控器控制方案)
4、遥控器和手机APP控制模式(下)
14_NC360竞赛无人机 | 使用3D雷达定位时的无人机飞行操作
3、遥控器和手机APP控制模式(上)
0、德州仪器TI MCU系统板之盘古单片机开发板简介
三、自动起飞后自定义航点任务飞行——《offboard外部控制模式操作教程》
室外少量树干环境下的无人机激光雷达SLAM定位演示
零基础学习竞赛二合一车模底盘安装教程第五讲——NCHD12灰度传感器自主寻迹模块的安装
6、航向角控制模式2和模式3
TI电赛飞行器-B题送货无人机第二部分模板目标特征学习
8_NC360竞赛无人机飞控串口直接解析激光雷达点云数据设置与显示操作教程
NC360P机载计算机开源教学无人机——搭载机器视觉、激光雷达SLAM、深度相机
LP-MSPM0L1306 Mini核心板标配例程实现新手引导 | TI MSPM0 MCU学习中心 | 2024年电赛
ADC安全绳按键V3版本接线教程(上)
5、灰度传感器自主寻迹模式1