V
主页
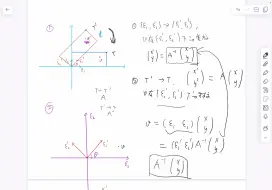
手工推导坐标系变换、刚体变换,理清变换矩阵、配准矩阵、旋转矩阵的详细求法,原理解释,三点确定坐标系。(前半部分可能很简单,后半部分是精华)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
刚体变换与坐标系变换的区别以及求坐标和矩阵
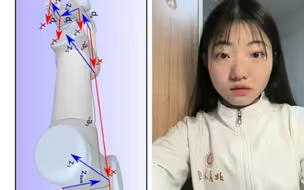
手写六自由度的机械臂DH参数建模,可以代入DH矩阵中,从而进行正逆解
【冒死上传刘旸讲英语】世上无难事!B站首发刘旸高中英语课程大合集!逆袭必备【内部私课】知识点全覆盖 教主英语课全网最全最完整版!拿走不谢!
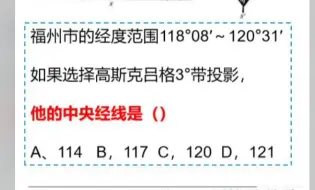
坐标系3°带6°带快速确定带号及中央经线
三维点云库PCL+QT开发,涉及点云滤波、关键点、配准、分割等多个模块
TK推文一站式流程
【雪梨老师】一首歌读对26个字母的自然拼读发音,英语真的很简单~【建议收藏】
【一白数学】一个视频搞明白坐标系的转换!
游戏捏脸大法!《inZOI》让blender实现韩妹自由!
数学突然开窍是什么感觉?
【20集全】B站2024最通俗易懂的论文写作教程,包含所有干货内容!值得本/硕/博反复观看的视频,别让信息闭塞毁了你!
旧工作手机也不浪费 同样可以做矩阵运行
【小学一年级数学】掼蛋游戏必胜的数学原理深入解析
Blender 三分钟GIET黑神话悟空同款粒子消散
【9月5日 国内最新版ChatGPT4.0】免费使用教程,免翻,手机、电脑均可以使用!
剧终定格卡点|剪辑教程
25考研,完形救命技巧课!简单粗暴的无脑套路,直选答案!【王无术】
剪映批量自动化制作左右分屏视频,解放生产力,一天上万视频产出不是梦,原创度去重操作杠杠的,强大的自动剪辑工具,剪映自动化大师~适用于Windows+mac
获取流量最快的方式一定是矩阵
【TED科普】干货 | 如何用最少时间学最多?如何积极学习|怎样才是学进去了|如何有效记笔记|教他人|SQ3R法|助记法
【三连免费获取】9月4号武汉部分学校高三年级9月调研考试/武汉九调/武汉高三开学摸底考全科试卷解析秒发
专有名词 5 分钟实战小课 16
同样是矩阵,本质却不相同
原来这才是影子跟读的正确打开方式啊啊啊啊
【小红书矩阵养号神器】全网最低成本运营小红书矩阵养号方法 一台电脑 多窗口独立IP 矩阵快速养号 这次教会你
医学生报考与择校保姆级攻略|手把手带你读招生简章,打赢考研信息战!
考公冷知识:辞退一名公务员比考上公务员更难!终于理解为什么大学生发疯似的考公了
利用AI自动写头条爆文,无脑拿收益,可矩阵
25国考即将报名,提前看!全流程及注意事项,手把手教你,真的简单,照着填不会出错!
假我,头脑思维矩阵,逻辑陷阱
【干货】如何手搓时光机
不通读全文做考研阅读的方法骗人?步骤放旁边,你看着做
一台电脑,小红书无限多开,独立IP独立账号独立指纹设备,做矩阵自热引流,日引100+
每日常识积累268
大四建模作品,导师说我可以提前毕业了!
超详细!彻底搞懂矩阵奇异值分解(SVD)本质+计算+应用!
2024全新小红书截流脚本工具,全自动实现同行粉丝列表无限截流曝光,轻松抢走同行精准粉丝!
8.24精品
我不允许你还不知道这个右脑记忆法,绝绝子!原来右脑记忆力比左脑强大100万倍!不靠死记硬背,就用这个右脑背书法,三天背烂一本书
兼职平台搬砖项目,操作简单无脑操作,支持矩阵无门槛无风险