V
主页
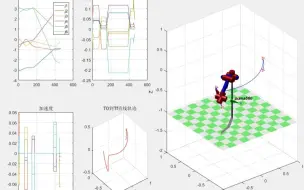
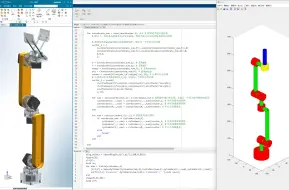
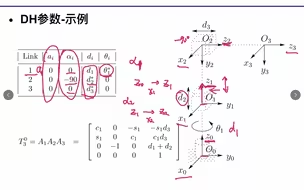
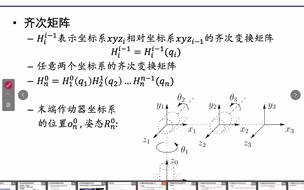
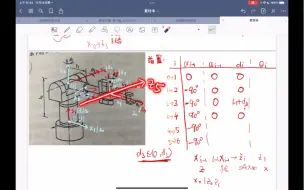
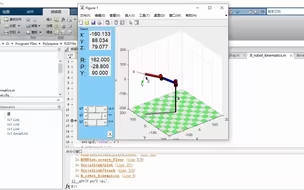
手写六自由度的机械臂DH参数建模,可以代入DH矩阵中,从而进行正逆解
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
机器人DH法、运动学、雅克比(Jacobian)矩阵
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
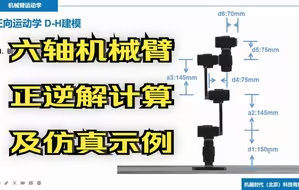
全程干货【六轴机械臂正逆解计算及仿真示例】
机器人DH参数建模助手-实时显示模型变化-matlab+RTB
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
【机械臂建模仿真】六轴机械臂MATLAB数学建模_直播回放
MALTAB六轴机器人运动仿真
空间机器人技术-建模与控制基础:13.DH参数举例
机器人动力学拉格朗日法详细推导(二连杆机械臂)
【开源课程】5分钟搞定机械臂开发和仿真环境,MoveIt!
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
5. 机械臂运动学逆解
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》
机械臂之DH参数法
【史上最强机械臂教程】机械臂运动学、轨迹规划和动力学控制仿真
【简易机械臂教程】定点坐标控制-逆运动学解、上位机、电路设计、编程实现、下位机、系统思维、资料开源……(完结)
【自制】我造了一台钢铁侠的迷你机械臂 !【硬核】
两分钟学习:四足机器人DH参数法
ur5、ur16e机械臂(优傲机器人)的运动学正逆解(c++解析解)+直线插值moveL+碰撞检测+动画仿真展示
三轴机械臂解算(逆运算)控制 - 只需要初中三角函数-超级详细讲!
机器人学 1.20 用标准DH参数建模Aubo机械臂
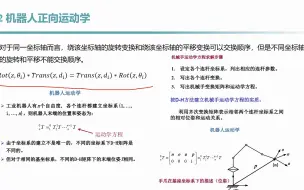
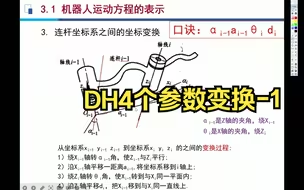
3.2 机器人DH参数表达法
3-13Matlab机器人工具箱的使用和DH建模方法回顾
3-6DH法4个参数变换-1
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
【机器人机构学】DH参数法讲解-基于定义出发
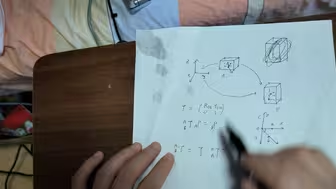
手工推导坐标系变换、刚体变换,理清变换矩阵、配准矩阵、旋转矩阵的详细求法,原理解释,三点确定坐标系。(前半部分可能很简单,后半部分是精华)
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
基于MALTAB/Simulink、Coppeliasim的六轴机械臂仿真
4. 机械臂集合法与DH表示法
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
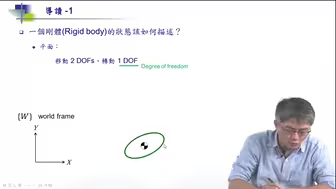
台大机器人学之运动学——林沛群(含课件+书籍)
机械臂研究入门必看流程!URDF导入|仿真平台|运动规划|运动学
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
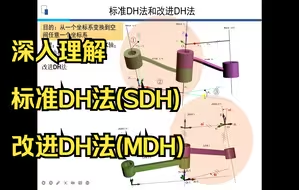
深入理解标准DH法(SDH)和改进DH法(MDH)
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
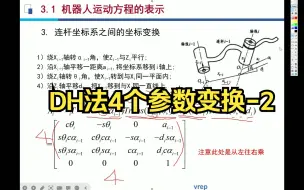
3-6DH法4个参数变换-2
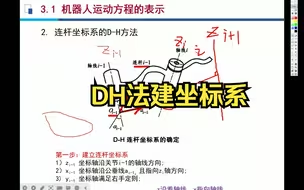
3-3DH法建坐标系
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)