V
主页
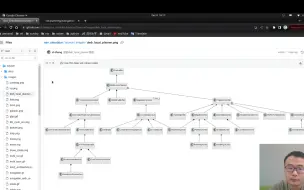
剖析Costmap2D类图结构
发布人
https://www.zhihu.com/question/556228216/answer/3283948170?utm_psn=1706413623067488256
打开封面
下载高清视频
观看高清视频
视频下载器
机器人导航算法应该怎么学(1)
学到了这些,证明你已经掌握了ROS的基本技能
navigation2的工程化担当:dwb_local_planner类图拆解
ROS仿真器实战: 7 地图与坐标系
机器人导航算法应该怎么学(2)
ROS仿真器实战: 8-5 利用仿真器验证规划效果
ROS仿真器实战: 9-2 机器人重定位过程讲解
ROS仿真器实战:1-4 仿真器成品演示
ROS仿真器实战:3-3 CMakeList.txt文件解析
ROS仿真器实战:5 虚拟时钟
ROS仿真器实战:4-2 机器人架构与导航架构的解析
ROS中实现dubins曲线作为机器人路径规划器
ROS仿真器实战:1-2 为什么从仿真器切入
ROS仿真器实战:2-2 ROS环境验证及Nav2的安装验证
"ROS1和ROS2:入门机器人开发应该怎么选!"
ROS仿真器实战: 10 终章-实现导航全流程验证
ROS仿真器实战:2-1 安装ROS到底对系统做了什么
ROS机器人导航优选路径规划器(同方向时磁吸效应)
ROS仿真器实战:4-3 导航仿真器功能集概览
ROS中实现reedshepp曲线作为机器人路径规划器
ROS仿真器实战: 8-1 路径规划仿真器效果
可读性最强的组合构造器实现
ROS仿真器实战: 6 遥控器
ROS仿真器实战: 8-4 straight路径规划器插件
"路径解算效果展示:多项式插值的魔法"
基于规则的路径规划
基于地形的路径规划案例
A*与势场法结合的路径规划算法的直观感受
ROS仿真器实战:4-1导航仿真器概述
"路径解算效果展示:多项式拟合的魔法"
ROS路径规划——固定区域的U型路径约束
ROS仿真器实战:1-3 课程规划及学习前提
EM Planner is all u need?
路就这么宽,你看着办吧。
ROS仿真器实战: 8-3 路径规划与RVIZ的桥接器
我写的机器人导航功能连日志都是可以播放的
C++单元测试gtest的介绍及其在ROS中的应用实战(十)
C++单元测试gtest的介绍及其在ROS中的应用实战(二)
多障碍物联合预测!理论全搞定~
宇宙级通用构造器,最优美风格的构造器,Groovy构造器的实现过程。