V
主页
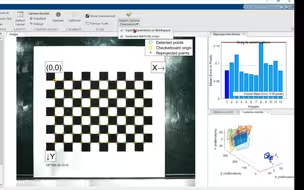
3.3 棋盘格标定法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定:从入门到实战【01概述】
测量零件的真实尺寸-棋盘格校准工具 CogCalibCheckerboardTool 简单应用
制作Halcon棋盘格标定板保姆级教程。
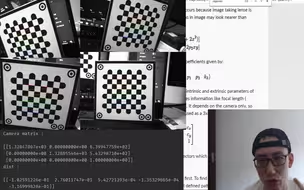
图像处理 3D标定(张正友标定法) 畸变矫正
相机标定:从入门到实战【06MATLA相机标定工具】
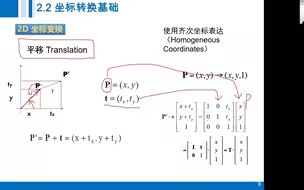
2.2 坐标转换基础
图像处理 3D标定 棋盘格标定板标定过程及相关函数详解
镜头畸变如何校正,Opencv棋盘格标定方法,标定版厂家
3.1 相机标定的基本概念
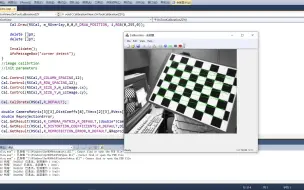
OpenCV相机标定
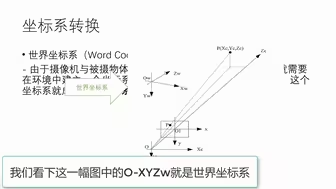
三维重建第三课:相机标定原理步骤(一)坐标系变换
相机标定:从入门到实战【05相机标定方法】
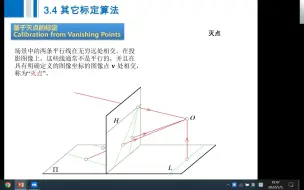
3.4 其他标定法-灭点
图像处理 OpenCV、HALCON、RSIL标定板检测算法分析及使用技巧
【标定】机器人手眼标定-方法及原理
4.2 点特征提取-SIFT
张正友标定法
单目相机标定总结及实战
相机标定步骤和影响标定板精度的主要因素
使用matlab和opencv进行相机标定
标定超详细操作流程来啦
5.2 二视图重建
4.1 梯度信息提取
相机标定的基本原理与经验分享
3.2 直接线性变换标定法DLT
2.4 射影几何基础续
三维重建第五课:相机标定原理步骤(三)张正友相机标定法初见和单应性
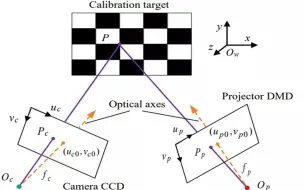
6.3 结构光三维成像
聊-海康机器视觉-标定板标定-图像坐标转物理坐标
5.1 对极几何-基础矩阵-本质矩阵
案例|高精度棋盘格标定板高清图片
单目相机标定理论及张正友标定法
2.1 图像的感知与获取
相机标定:从入门到实战【02相机基础知识】
6.1 双目视觉系统介绍
2.4 射影几何基础
4.2 点特征提取-Harris特征点
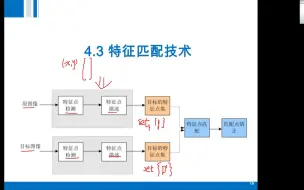
4.3 特征匹配技术
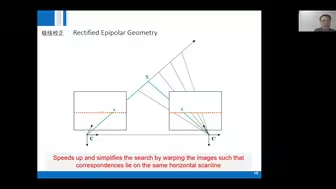
6.2 极线校正-密集匹配
7.1 三维点云的基本特征