V
主页
京东 11.11 红包
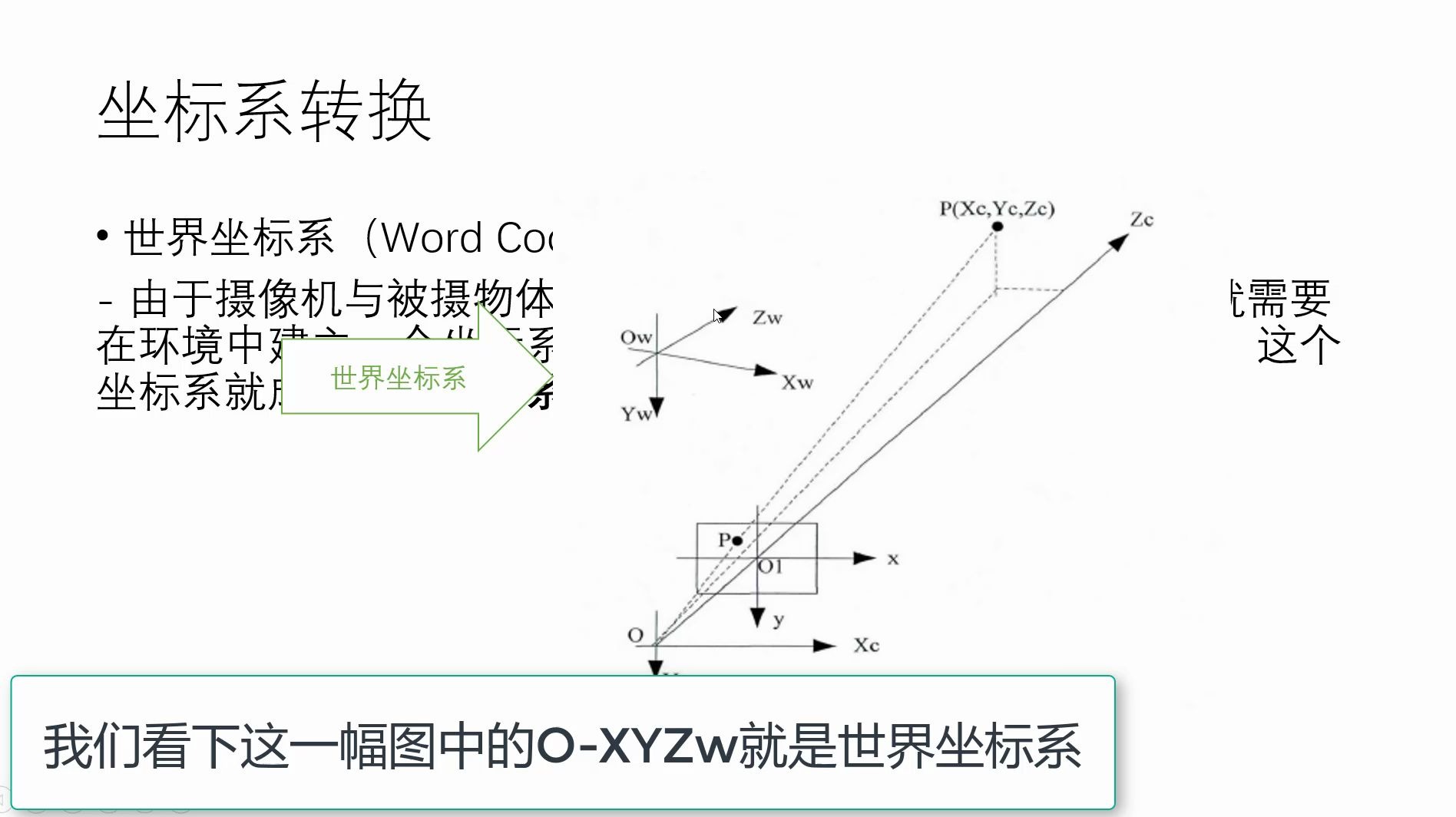
三维重建第三课:相机标定原理步骤(一)坐标系变换
发布人
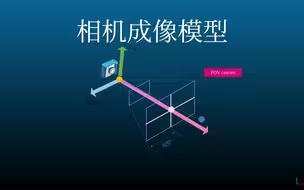
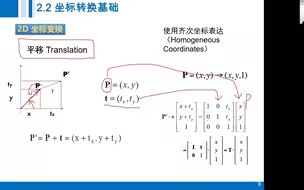
这节课是三维重建的理论基础课程,将讲解三维视觉中三种坐标系世界坐标、相机坐标系、像素坐标系以及之间的转换构建相机模型。 (up主注:感谢各位看官的青睐,本up主,是个某手公司的打工仔,从学术圈到工业界,科研任务繁重,工作任务繁重,更新不及时真的很抱歉,需要资料或者感兴趣到可以加下我到微信:xiaov2016211830。撑着午休赢来第三课,晚上会及时更新第四课,谢谢大家。)
打开封面
下载高清视频
观看高清视频
视频下载器
三维重建第四课:相机标定原理步骤(二)世界坐标系到相机坐标系与畸变
相机标定:从入门到实战【01概述】
矩阵变换-三维坐标系
相机标定与单目测量(1)
单目相机标定理论及张正友标定法
相机标定步骤和影响标定板精度的主要因素
从零搭建一套结构光3D重建系统 [理论+源码+实践]
3.2-刚体运动坐标转换1
坐标系的转换
图像处理 3D标定(张正友标定法) 畸变矫正
带你认识坐标系,一次搞明白地理坐标系和平面坐标系的关系。特别适合测绘、地信、导航等专业的同学观看
3.1 相机标定的基本概念
双目相机标定及参数写入
三维重建第八课:LM算法之优化方法初探
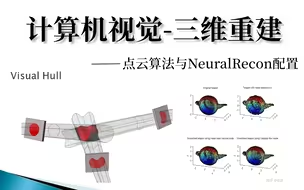
【三维重建完全可自学教程】2023B站最完整的计算机视觉-3D三维重建教程分享!知名博士通俗易懂的解释,学三维重建真的不难!
计算机视觉之三维重建篇(精简版) 北京邮电大学 鲁鹏
双相机标定
【一白数学】一个视频搞明白坐标系的转换!
聊-海康机器视觉-标定板标定-图像坐标转物理坐标
2022B站最好最全的【三维重建】课程!!!北邮教授竟然把三维重建讲的如此通俗易懂,学不会UPZHIJIE 退网下架!!!-人工智能/计算机视觉/三维重建
相机标定的基本原理与经验分享
坐标系平移、旋转、缩放统一公式推导
手眼标定—原理与实战(上篇)
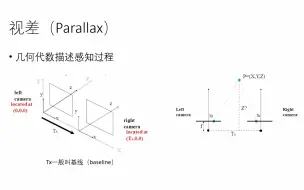
双目相机原理揭秘--双目立体视觉原理搞懂很简单
三维重建第10课:大家好,好久不见了。
【计算机视觉】相机标定/双目测距/Camera Calibration
011校正的立体视觉——1相机模型与内外参矩阵
三维重建第一课:三维重建技术介绍及学习路径
机器视觉中的三维坐标系与和相机图像坐标系是什么?你知道它们之间的关系吗?
通俗易懂:带你探索相机成像模型的奥秘!【重制版】
2.2 坐标转换基础
三维重建第七课:相机标定代码讲解
三维重建第二课:双目立体视觉重建基本原理
手工推导坐标系变换、刚体变换,理清变换矩阵、配准矩阵、旋转矩阵的详细求法,原理解释,三点确定坐标系。(前半部分可能很简单,后半部分是精华)
三维重建第六课:相机标定原理步骤(四)张正友相机标定法数学推导求解
08-相机标定
相机标定的基本原理与经验分享
【机器人状态估计】1. 机器人坐标系 变换矩阵 旋转矩阵 世界坐标系 运动坐标系
2.1 图像的感知与获取
相机标定:从入门到实战【05相机标定方法】