V
主页
Marengo-2.6 视频模型
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
阿里大规模计算集群网络稳定性的挑战与实践
从物理系统中学习的欧几里得神经网络E(3)NN
[SIGCOMM2023] : Offloading
利用结构实现高效灵活的机器人接触操作
从物理互动中学习结构化世界模型
机器人中的数值方法
家庭通用机器人
Stanford CS234 Reinforcement Learning,RLHF&DPO
物理视角看GNN
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
高分辨率触觉感知在反应式机器人操作中的应用
授人以渔:检索技巧和方法
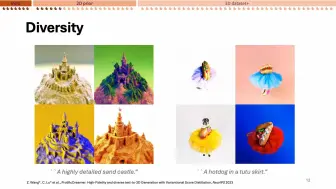
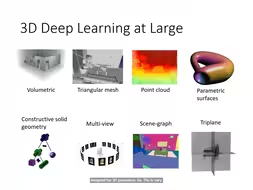
3D 4D生成和生成先验建模
机器人学习中的收缩理论
Paint-it:文本纹理生成
ICML2024 Tutorial,Machine Learning on Function spaces
[APNEET2023] 超大规模RDMA:经验和未来方向
下一代机器人感知:3D场景图,可验证算法,自监督学习
机器人空间感知基础
AI与3D生成
Berkeley EECS研讨会讨论:Future of Robotics
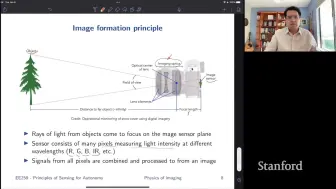
Stanford EE259:镜头、图像传感器、图像信号处理
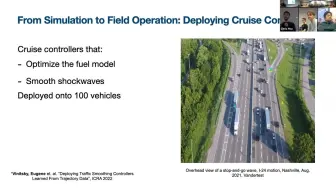
多智能体系统中的真实世界强化学习:大规模自主合作性部署
ICML 2024 Tutorial,Graph Learning
Seminar in Computer Architecture 2024,近存计算 MegIS & Smart-Infinity
Stanford CS149 并行计算,Cache Coherence 11
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
Geometric Regularizations for 3D Shape Generation
3DV 2024,下一代reconstruction
Stanford CS25: Robotics and Imitation Learning
[OSDI2023] SEPH: 在持久内存上实现可扩展、高效和可预测的哈希检索
K8S在边缘端用于AI模型部署的演示
Flying robots
数字实验室做机器人及模拟机器人开发
通用机器人路径思考:scaling law、数据飞轮和具身智能
[NSDI2023] Gemel: 边缘端基于模型合并方法的内存高效,实时视频分析
Yejin Choi: 如何让小模型work
复杂室内外环境中的机器人导航
Ray Summit 2024,Apple弹性GPU资源管理
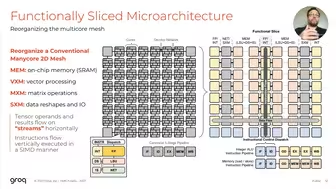
Groq张量流式处理器架构