V
主页
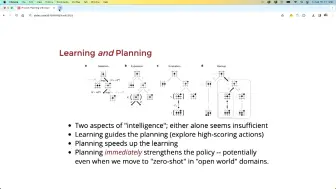
Yejin Choi: 如何让小模型work
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
字节万级GPU集群LLM训练
[a16z] AI Copilots and the Future of Knowledge Work with Microsofts Kevin
AI Hardware
Bill Dally,Directions in Deep Learning Hardware
智能机器人中的物理模型
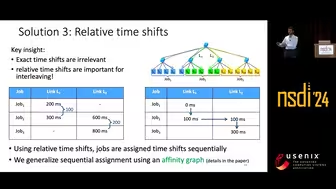
[NSDI 2024] CASSINI: ML集群中的网络感知job调度
Berkeley EECS研讨会讨论:Future of Robotics
ICRA2024 LHMP研讨会:Isn't Motion Prediction just Model-based RL?
Meta:GenAI Training In Production:软硬件及网络考量
家庭通用机器人
Marengo-2.6 视频模型
Groq's Tensor Streaming Processor
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
从物理互动中学习结构化世界模型
Stanford EE364A: Convex Optimization lecture13
凸集图规划
DéjàVu: 稀疏上下文的高效LLM推理服务
机器人学习中运动表示
KAN神经网络
MIT机器人操作Lecture 2
为什么需要建立机器人学徒但不单独做?
3DV 2024,下一代reconstruction
[CVPR24 Vision Foundation Model Tutorial] 具有精细落地能力的LMMs
Stanford CS25: Robotics and Imitation Learning
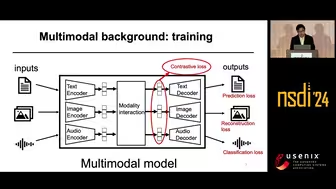
[NSDI 2024] DISTMM: 加速多模态模型训练
神经场在机器人操作中的应用
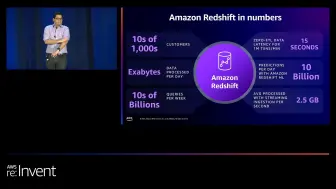
Amazon Redshift-云数仓的十年创新
Moxin:个人设备上运行大模型
机器人学习中的收缩理论
Efficient Large Vision Models
Zero Bubble (Almost) Pipeline Parallelism
Aligning LLMs with Direct Preference Optimization
HPC视角下的混合精度
基于Epigraph Form和DRL的Stabilize-Avoid最优控制算法
[Cuda mode]Lecture 5:Going Further with CUDA for Python Programmers
扩散生成视频
Real World Robotics Tutorial7:Bringing Robots to the World
通过扩散策略进行机器人灵活操作
Vision与3D
Stanford EE364A:Convex Optimization lecture7