V
主页
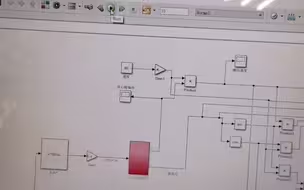
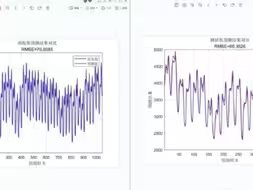
线性时变模型预测控制 LTV-MPC
发布人
线性时变模型预测控制LTV-MPC Matlab+simulink仿真(2020b) 线性时变系统(传递函数 单入单出) 包含:1:代码部分:隐式mpc 自适应mpc 时变mpc,三种mpc的闭环仿真 2:基于simulink的时变mpc仿真
打开封面
下载高清视频
观看高清视频
视频下载器
人工势场法换道主动避撞加mpc模型预测控制,carsim和simulink联合仿真
MATLAB直线倒立摆一阶倒立摆LQR控制仿真
CarSim与Simulink联合仿真,实时检测
【Python】人形机器人——模型预测控制
自动驾驶控制-基于MPC的速度控制仿真
基于运动学的模型预测控制,能够实现圆形轨迹的跟随,matlab2016b版本及以上可用
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
四轮转向汽车Carsim-simulink联合仿真MPC路径跟踪模型
自动驾驶基于mpc实现的车道保持辅助系统,simulink模型,m脚本文件
永磁同步电机模型预测控制,外环采用滑模变结构控制,内环采用有限集模型预测控制,效果非常好
自动泊车~单步垂直泊车
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
基于二自由度车辆动力学模型搭建的MPC车辆五次多项式换道模型
三阶线性自抗扰控制器
LSTM多变量时间序列预测,(多输入单输出) 基于长短期记忆神经网络LSTM的多变量时间序列预测
典型的”大色鬼“
六轴机器人仿真轨迹规划姿态插补关节空间轨迹规划笛卡尔空间轨迹规划 353轨迹规划
Adams多机器人运动仿真
四旋翼ADRC模型
STM32F407+TIM+ADC+FFT+DAC+lVGL界面简易信号发生器加示波器源码
精校熟肉」欠驱动机器人学(MIT 6.832) 2024春-L7-李雅普诺夫分析 I
发那科机器人二次开发 C#读取和写入数据,可以获取点位信息。
直流电机双闭环调速系统仿真模型 转速电流双闭环调速
上位机引导机械手、ABB机器人C#二次开发、 PC SDK 开发项目
水泵一用一备,二用一备,定时轮换集成的功能块
八旋翼无人机 非线性八旋翼无人机建模控制simulink仿真
PMSG永磁同步发电机并网仿真模型
完整的PID的LQR四旋翼无人机simulink
四旋翼无人机轨迹跟踪控制
MATLAB四旋翼无人机仿真simulink simscape可视化仿真 四旋翼飞行器
200smart电机控制程序
Ros机器人产品,具有Slam导航、定位、路径规划、自主避障等功能
carsim与simulink联合仿真——多步垂直泊车(开环控制方法)
sift图像拼接
11月11日~11月17日|星座運勢週報|唐綺陽
三相PWM整流电路,SVPWM调制,电压电流双闭环控制
威纶通触摸屏与4台欧姆龙OMRON温控器modbusRTU485直接通讯,不经过PLC,有PV值,SV值,Mv值,运行,停止,状态,AT自整定,电流值,温度曲线
电动车电池匹配系统计算设计
factory IO仿真项目
robotstudio ABB机器人 仿真搬运