V
主页
京东 11.11 红包
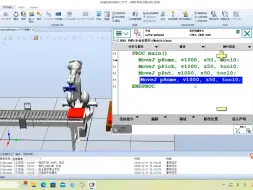
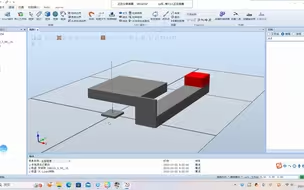
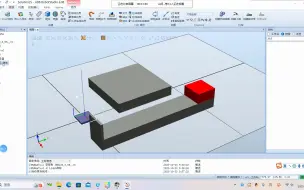
9.robotstudio创建吸盘smart组件实现抓取功能(下)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4.创建吸盘工具(1)
8.robotstudio创建吸盘smart组件实现抓取功能(上)
10.robotstudio吸盘smart组件抓放功能测试
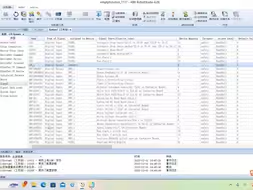
11.robotstudio配置机器人的输入输出(IO)信号
4.创建吸盘工具(2)
9.smart组件_测试一个零件的抓取
8.smart组件_吸盘线性传感器、产生测试工件
2传送带创建
11.smart组件_完成整个吸盘组件的创建
7.smart_组件完成多个工件的运动仿真
5.smart组件_创建、工件移动、面传感器
15.针对程序中容易出错的地方进行说明与解答_线性传感器失效、吸盘抓取失败、IO信号、参数修改、如何快速发现程序中的错误
1 robortstudio介绍及机器人模型导入
12.robotstudio机器人系统与吸盘smart组件之间的通讯
33.robotstudio通过嵌套循环实现多排多列多层的码垛
30.robotstudioABB机器人系统与传送带组件、吸盘组件联动的程序实现过程
32.robotstudio利用for循环实现机器人单列码垛
27.robotstudio传送带组件创建(中)
16.程序进阶之带参数的例行程序与数组应用(完成工件码垛位置不规则的程序编写)_创建数组
6.robotstudio机器人位置数据的删除及工件的放置
3.创建工件及码垛台
6.smart组件_组件逻辑设定,完成一个工件的仿真
13.完成一个工件的自动搬运程序
14.利用RAPID完成整个码垛工作站程序的编写与调试
29.robotstudio传送带组件调试
16.robotstudio延时指令的使用
1.robotstudio示教器手动操纵之单轴运动与线性运动
28.robotstudio传送带组件创建(下)
18.利用带有参数的例行程序与数组完成无规则码垛程序的编写
7.robotstudio基本搬运程序的编写
34.robotstudio通过while循环与test判断语句和if判读语句的嵌套实现任意形式的码垛,想怎么码就怎么码!
vue瀑布流组件,我找你好久了
12.机器人输入输出信号的配置
31.robotstudio在主程序中调用其他例行程序操作
26.robotstudio传送带组件创建(上)
13.robotstudio通过示教器设置机器人输出信号
14.robotstudio解决搬运工件取放位置不准确的问题(上)
17.robotstudio轨迹规划解决运动干涉问题
15.robotstudio解决搬运工件取放位置不准确的问题(下)
3.robotstudio基本编程指令move的用法