V
主页
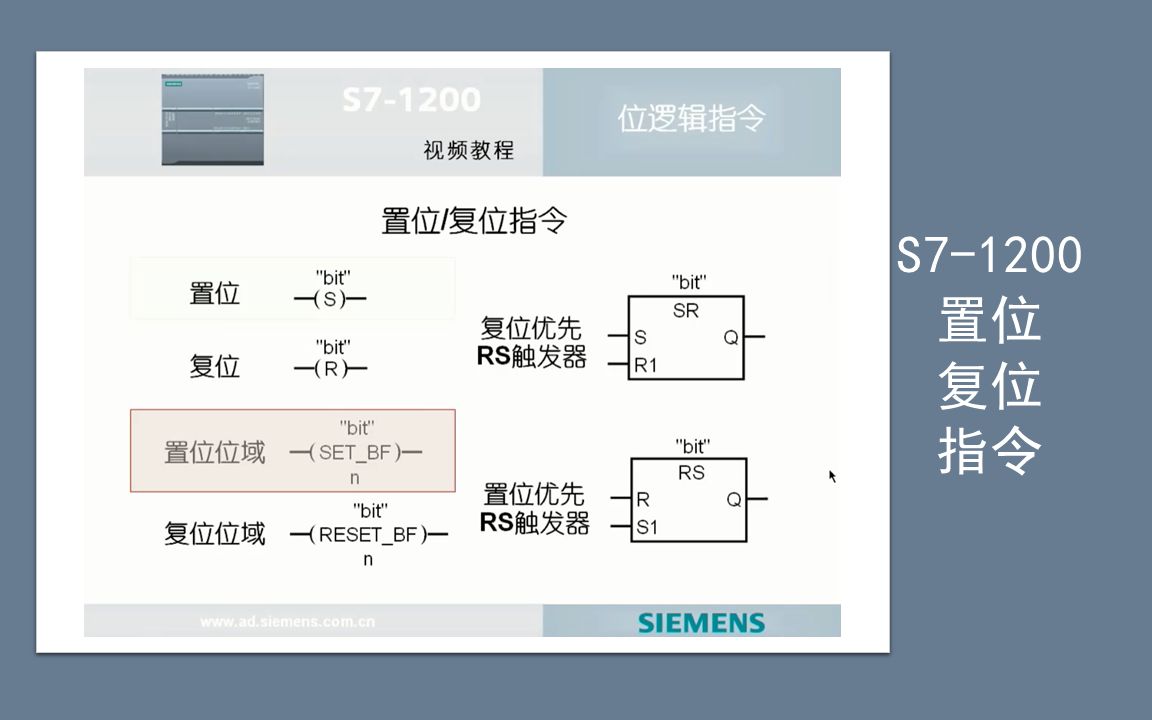
32 S7-1200_ 置位_复位指令
发布人
S7-1200_ 置位_复位指令说明
打开封面
下载高清视频
观看高清视频
视频下载器
36 S7-1200_ 脉冲定时器
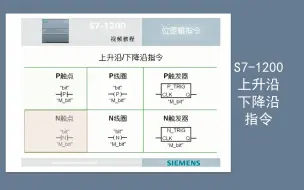
31 S7-1200_ 上升沿_下降沿指令
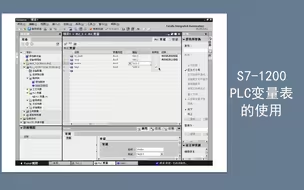
20 S7-1200_ PLC变量表的使用
40 S7-1200_ 移动指令
水罐水量PID调节
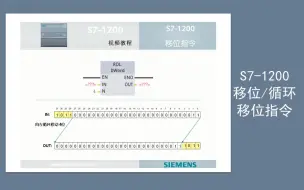
41 S7-1200_ 移位_循环移位指令
37 S7-1200_ 计数器
3-工业机器人的机械结构及功能
173.S7-1200:编码器定位应用案例-程序编写
6-工业机器人传感器的应用
42 S7-1200_ 基本逻辑运算指令
S7-1200气动机械手基础搬运
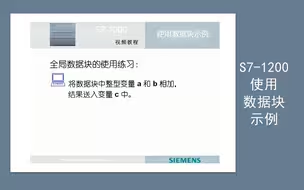
49 S7-1200_ 使用数据块示例
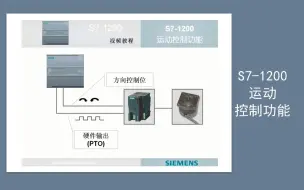
55 S7-1200_ 使用S7-1200的运动控制功能
24 S7-1200_ 使用分配列表
15 S7-1200_ 编程软件的安装及设置中文界面
54 S7-1200_ S7-1200通过USS协议控制变频器
35 S7-1200_ 关断延时定时器
西门子S7-1200PLC模拟量输入为什么加电阻?
1-2_ModBus TCP通信(西门子200-SMART与西门子200-SMART)
西门子S7-1500应用讲解
22 S7-1200_ 使用交叉引用
网页运行的自动化生产线PLC实训系统(可下载PLC源码、PLC sim中文版)
10-工业机器人的运动指令
50 S7-1200_ 局部变量
48 S7-1200_ 数据块概述
6 S7-1200_ CPU面板介绍
1 S7-1200_ S7-1200的功能与特点_0
23 S7-1200_ 使用调用结构
PID控制是什么黑科技?这下明白了
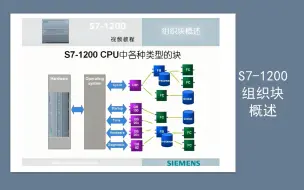
26 S7-1200_ 组织块概述
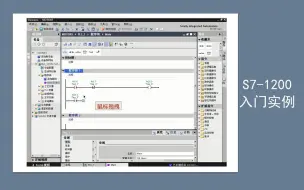
19 S7-1200_ s7-1200入门实例
9 S7-1200_ KTP系列HMI面板介绍
12-焊接机器人的分类及特点
5 S7-1200_ S7-1200与S7-300的比较
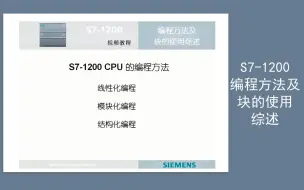
45 S7-1200_ S7-1200的编程方法及块的使用综述
龙门码垛讲解
17 S7-1200_ 硬件的组态
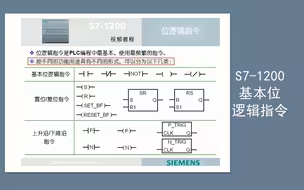
30 S7-1200_ 基本位逻辑指令
PLC编程范式之IO映射模式