V
主页
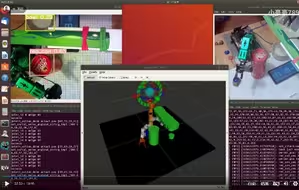
基于YOLOV8 + D435i 的 ROS机械臂目标抓取(附机械臂参考代码)
发布人
基于4月份开发的目标识别功能“YOLOV8 + D435i 获得目标距离, 进而获得目标位置_哔哩哔哩_bilibili” ,右机械臂安装的D435i取目标位置后,经坐标转换 映射到world坐标系,利用ROS Moveit! 控制左机械臂抓取目标。机械臂代码参考链接:GitHub - ROBOTIS-GIT/open_manipulator_p: OpenManipulator-P for controlling in Gazebo and Moveit with ROS【https://github.com/ROBOTIS-GIT/open_manipulator_p】
打开封面
下载高清视频
观看高清视频
视频下载器
同步率100%?|上海交通大学机械臂工程机器人登场!周六晚20:00,锁定《机甲大师》第四季最终集,一起进入“交龙时间”!
基于YoloV5的六轴机械臂抓取实现
【开源项目】【深度教学】手把手带你实现视觉引导机械臂抓取(STM32+OPENMV方案)
YOLOv8+姿态估计,获得目标位置后用机械臂抓取+VR头显操控制相机交互
YOLOV8 + D435i 获得目标距离, 进而获得目标位置
基于YOLOV8 + D435i 的 ROS机械臂目标跟随(双机械臂合作)
机械臂深度相机视觉抓取
基于Yolo的机械臂抓取(二)——机械臂逆运动学控制
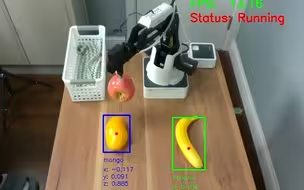
六自由度机械臂+D435深度摄像头_实现水果抓取
人形机器人机械臂基于YOLO目标检测+6D目标位姿估计+Moveit实现目标抓取~附参考资料
YOLOv8 +SAM,真的可以了!两行代码即可实现分割一切,一行代码实现标注一切
毕业设计:基于ROS的移动机器人智能抓取研究与实现
机械臂+YOLO实现目标物体抓取
基于YOLOv8模型的机械臂智能抓取系统
基于YOLO的机械臂抓取(三)——手眼标定
YOLOv8杀疯了!目标检测和实例分割全面演示!
基于ROS的六轴机械臂控制
只是补偿重力,没啥技术含量
基于YOLO的机械臂自主抓取(一)——目标定位
基于YOLOv8非全自动打游戏
【开源| 教程| 双目测距】 在YOLOv5中加入双目测距,实现目标测距
使用OpenCV和YOLOv8,制作一个交通监控系统!
ubuntu20.04 + d435i + vins-fusion 实战测试
方舟无限 ARX5
【机械臂入门教程】机械臂视觉抓取从理论到实战
基于深度强化学习的视觉反馈机械臂抓取系统
RealSenseD435i 深度相机 SDK安装
Yolov8+TensorRT在ROS下的目标检测Demo
Windows下的Inter Realsens D435/D435i环境配置,深度相机用Python调用
用机械臂按电梯的酒店配送机器人ROBOTIS GAEMI
【古月居】ROS机械臂开发:从入门到实战
D435i相机VINS-Mono vs. VINS-Fusion对比
Yolo v8惊人的目标识别能力
【复制】B站的第N台稚晖君Dummy机械臂!终结者配色!!
yolo+PointCloud+MoveIt+ROS机械臂自主避障抓取
YOLOv8 vs YOLOv5目标无人机检测效果对比
D435i挂载安装说明
【ROS机械臂入门教程】第1讲-概述
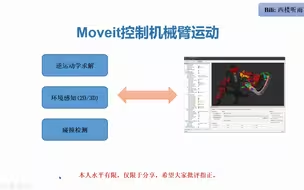
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
开源!基于Jetson开发的ROS视觉机械臂JetMax,带你领略真正的人工智能!